DAA 16 (Part 1) – Single Source Shortest Paths: Greedy vs DP vs Divide & Conquer | CS F364 скачать в хорошем качестве
DAA 16 (Part 1) – Single Source Shortest Paths: Greedy vs DP vs Divide & Conquer | CS F364
8 дней назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: DAA 16 (Part 1) – Single Source Shortest Paths: Greedy vs DP vs Divide & Conquer | CS F364 в качестве 4k
У нас вы можете посмотреть бесплатно DAA 16 (Part 1) – Single Source Shortest Paths: Greedy vs DP vs Divide & Conquer | CS F364 или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон DAA 16 (Part 1) – Single Source Shortest Paths: Greedy vs DP vs Divide & Conquer | CS F364 в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
DAA 16 (Part 1) – Single Source Shortest Paths: Greedy vs DP vs Divide & Conquer | CS F364
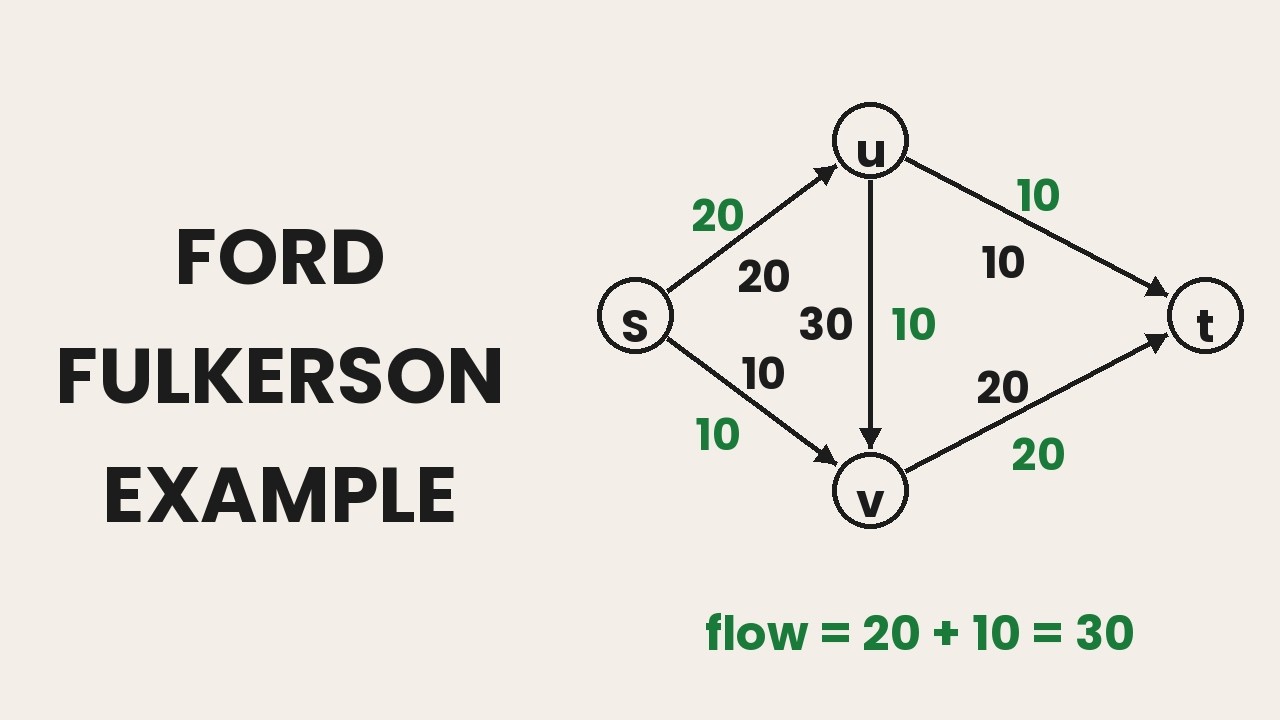
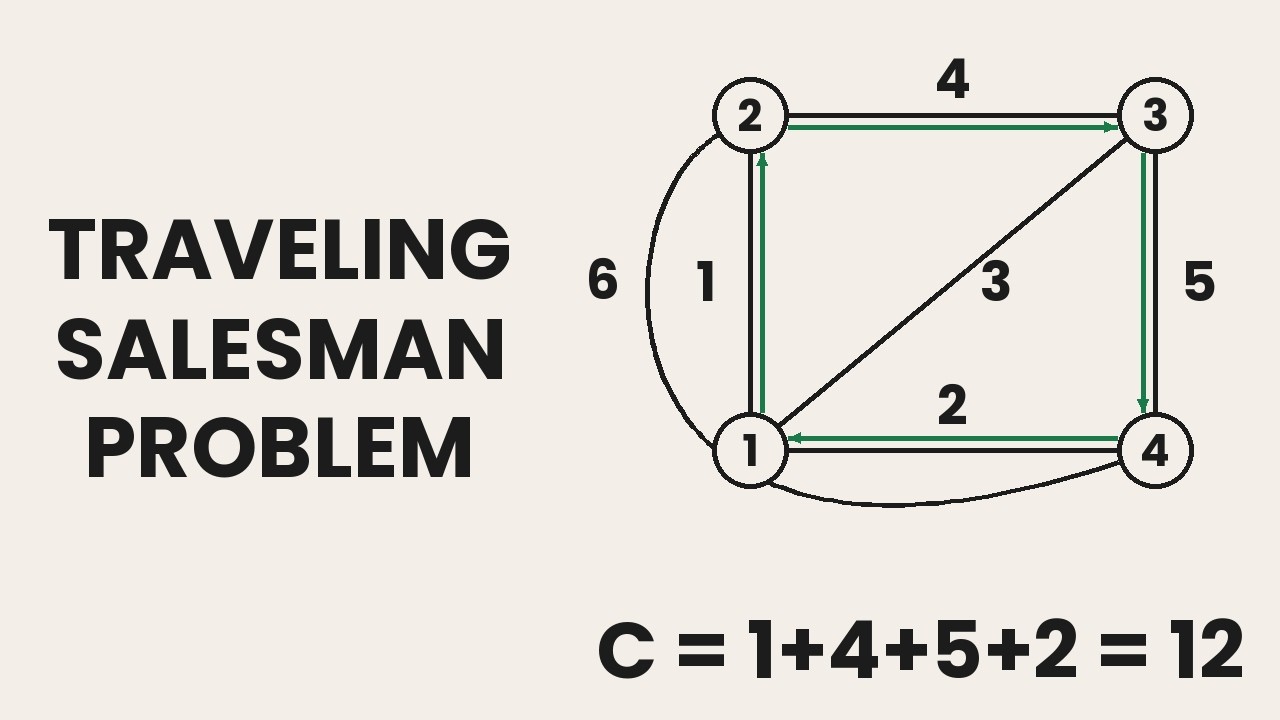
This lecture is DAA 16 (Part 1) in the Design and Analysis of Algorithms (DAA) course (CS F364). It presents a comparative complexity analysis of three fundamental algorithm design paradigms—Divide and Conquer, Dynamic Programming, and Greedy algorithms—using the Single Source Shortest Paths (SSSP) problem as a common case study. The lecture begins by motivating the comparison: the same computational problem can often be solved using multiple design techniques, but with very different time complexities. A general qualitative ordering is established, showing why Divide and Conquer algorithms are typically the least efficient, Dynamic Programming improves performance by avoiding recomputation, and Greedy algorithms can be the most efficient when their correctness conditions hold. This comparison is then made concrete through the Single Source Shortest Paths problem. Three algorithmic approaches are analyzed: A Greedy approach using Dijkstra’s Algorithm, along with its time complexity when implemented using appropriate data structures A Dynamic Programming approach using the Bellman–Ford algorithm, including its dependence on the number of vertices and edges A Divide and Conquer–style formulation, obtained by repeatedly relaxing edges in a recursive manner, and its resulting higher time complexity Under standard assumptions on graph density, the lecture derives and compares the asymptotic bounds of these approaches, leading to the clear inequality: Greedy algorithms are asymptotically faster than Dynamic Programming, and Dynamic Programming is faster than Divide and Conquer for this problem. in terms of time complexity for this problem. The lecture emphasizes why these differences arise—focusing on overlapping subproblems, repeated computation, and the structural constraints that enable greedy choices—thereby strengthening conceptual understanding of when and why each paradigm should be used. The, correctness proof of Dijkastra's algorithms and complete worked out examples of Bellman-Ford and Dijkstra's algorithm are deferred to subsequent lectures. 📌 Topics Covered in This Lecture Comparison of algorithm design paradigms Divide and Conquer vs Dynamic Programming vs Greedy General time-complexity hierarchy of paradigms Single Source Shortest Paths (SSSP) as a case study Greedy approach: Dijkstra’s Algorithm and complexity Dynamic Programming approach: Bellman–Ford and complexity Divide and Conquer formulation of SSSP Effect of overlapping subproblems on efficiency Impact of graph density on running time Asymptotic comparison of the three approaches Conceptual justification of efficiency differences 🎯 Who Should Watch Students studying Design and Analysis of Algorithms (DAA) B.Tech / BE / M.Sc. / MCA / GATE aspirants Learners comparing algorithmic paradigms Anyone seeking a deeper understanding of time-complexity trade-offs 🔗 Playlist This video is part of the playlist: Design and Analysis of Algorithms – Complete DAA Course
Comments




![Почему реактивный двигатель не плавится? [Veritasium]](https://imager.clipsaver.ru/F6UB0V2Fct4/max.jpg)












