Virtual Training for a Real Application: Wall Robotic Construction скачать в хорошем качестве
Virtual Training for a Real Application: Wall Robotic Construction
7 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Virtual Training for a Real Application: Wall Robotic Construction в качестве 4k
У нас вы можете посмотреть бесплатно Virtual Training for a Real Application: Wall Robotic Construction или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Virtual Training for a Real Application: Wall Robotic Construction в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
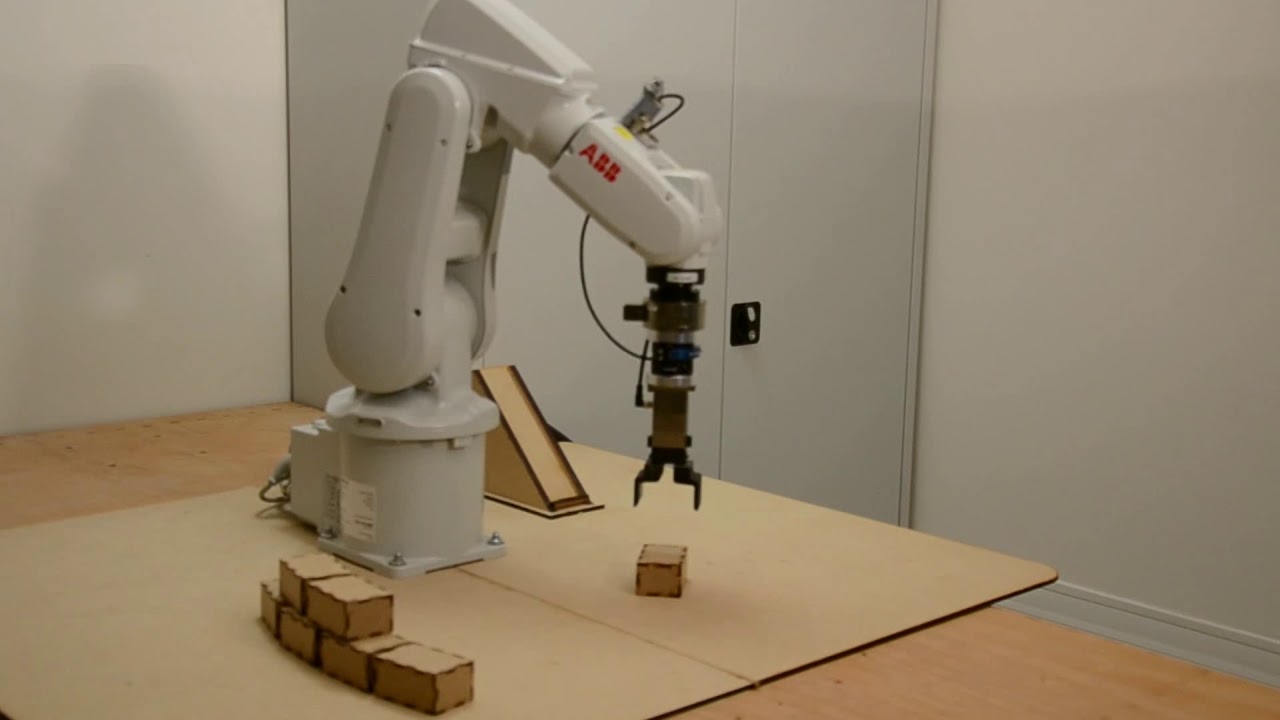
Virtual Training for a Real Application: Wall Robotic Construction
Project Page: http://imagine.enpc.fr/~loingvi/unloc/ Localizing an object accurately with respect to a robot is a key step for autonomous robotic manipulation. In this work, we propose to tackle this task knowing only 3Dmodels of the robot and object in the particular case where the scene is viewed from uncalibrated cameras—a situation which would be typical in an uncontrolled environment, e.g., on a construction site. We demonstrate that this localization can be performed very accurately, with millimetric errors, without using a single real image for training, a strong advantage since acquiring representative training data is a long and expensive process. Our approach relies on a classification Convolutional Neural Network trained using hundreds of thousands of synthetically rendered scenes with randomized parameters. To evaluate our approach quantitatively and make it comparable to alternative approaches, we build a new rich dataset of real robot images with accurately localized blocks.
Comments
-
 2 дня назад
2 дня назад
-
 19 часов назад
19 часов назад
-
 2 месяца назад
2 месяца назад
-
 1 месяц назад
1 месяц назад
-
 23 часа назад
23 часа назад
-
 4 недели назад
4 недели назад
-
 7 дней назад
7 дней назад
-
 2 года назад
2 года назад
-
 1 день назад
1 день назад
-
 Трансляция закончилась 1 день назад
Трансляция закончилась 1 день назад
-
 2 месяца назад
2 месяца назад
-
 Трансляция закончилась 1 день назад
Трансляция закончилась 1 день назад
-
 3 недели назад
3 недели назад
-
 3 месяца назад
3 месяца назад
-
 1 день назад
1 день назад
-
 1 день назад
1 день назад
-
 2 дня назад
2 дня назад
-
 6 месяцев назад
6 месяцев назад
-
 1 день назад
1 день назад
-
 1 день назад
1 день назад