霍尔传感器4对极电机原来也能这么稳定?(10霍尔传感器调整参数ODrive BLDC电机,无刷电机,伺服控制 скачать в хорошем качестве
霍尔传感器4对极电机原来也能这么稳定?(10霍尔传感器调整参数ODrive BLDC电机,无刷电机,伺服控制
5 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: 霍尔传感器4对极电机原来也能这么稳定?(10霍尔传感器调整参数ODrive BLDC电机,无刷电机,伺服控制 в качестве 4k
У нас вы можете посмотреть бесплатно 霍尔传感器4对极电机原来也能这么稳定?(10霍尔传感器调整参数ODrive BLDC电机,无刷电机,伺服控制 или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон 霍尔传感器4对极电机原来也能这么稳定?(10霍尔传感器调整参数ODrive BLDC电机,无刷电机,伺服控制 в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
霍尔传感器4对极电机原来也能这么稳定?(10霍尔传感器调整参数ODrive BLDC电机,无刷电机,伺服控制
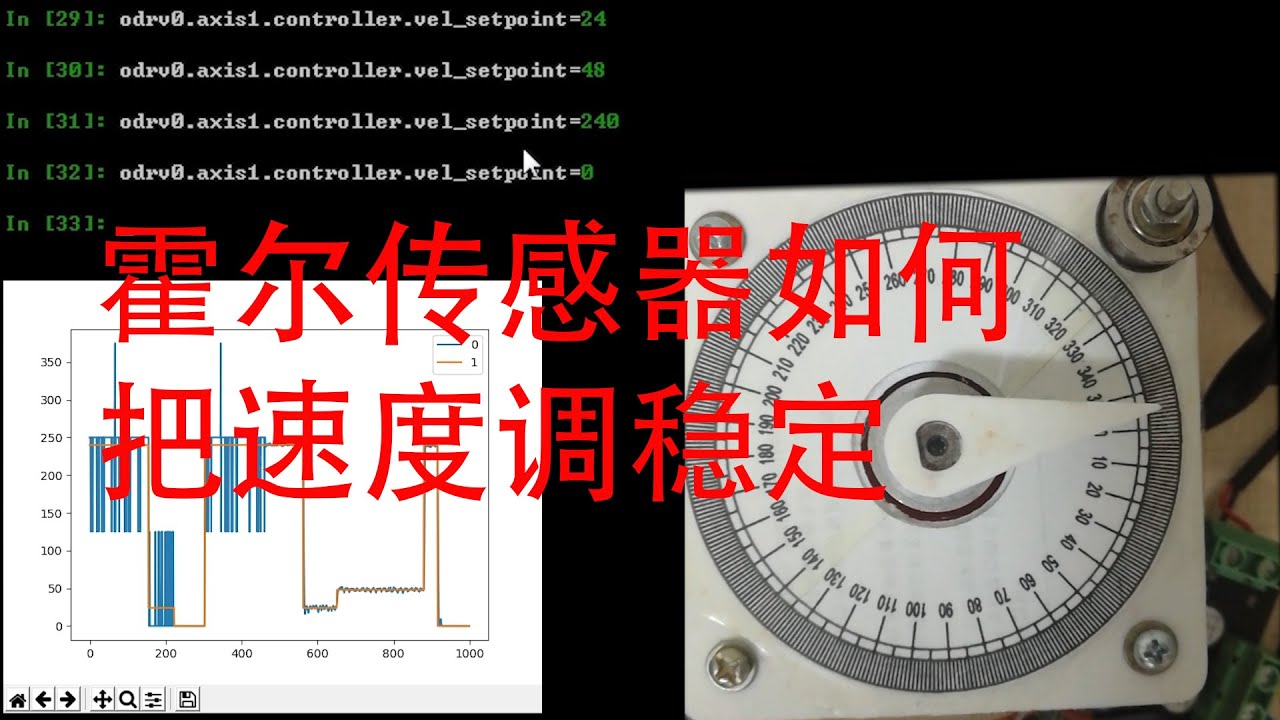
Tuning the motor controller is an essential step to unlock the full potential of the ODrive. Tuning allows for the controller to quickly respond to disturbances or changes in the system (such as an external force being applied or a change in the setpoint) without becoming unstable. Correctly setting the three tuning parameters (called gains) ensures that ODrive can control your motors in the most effective way possible. The three values are: axis.controller.config.pos_gain = 20.0 [(turn/s) / turn] axis.controller.config.vel_gain = 0.16 [Nm/(turn/s)] axis.controller.config.vel_integrator_gain = 0.32 [Nm/((turn/s) * s)] An upcoming feature will enable automatic tuning. Until then, here is a rough tuning procedure: Set vel_integrator_gain gain to 0 Make sure you have a stable system. If it is not, decrease all gains until you have one. Increase vel_gain by around 30% per iteration until the motor exhibits some vibration. Back down vel_gain to 50% of the vibrating value. Increase pos_gain by around 30% per iteration until you see some overshoot. Back down pos_gain until you do not have overshoot anymore. The integrator can be set to 0.5 * bandwidth * vel_gain, where bandwidth is the overall resulting tracking bandwidth of your system. Say your tuning made it track commands with a settling time of 100ms (the time from when the setpoint changes to when the system arrives at the new setpoint); this means the bandwidth was 1/(100ms) = 1/(0.1s) = 10hz. In this case you should set the vel_integrator_gain = 0.5 * 10 * vel_gain. 调整电动机控制器是释放ODrive潜力的必不可少的步骤。通过调整,控制器可以快速响应系统中的干扰或变化(例如施加的外力或设定值的变化)而不会变得不稳定。正确设置三个调整参数(称为增益)可确保ODrive能够以最有效的方式控制电动机。这三个值是: axis.controller.config.pos_gain = 20.0 [(转/秒)/转] axis.controller.config.vel_gain = 0.16 [Nm /(转/秒)] axis.controller.config.vel_integrator_gain = 0.32 [Nm /(((圈/秒)* s)] 即将推出的功能将启用自动调整。在此之前,这里是一个粗略的调整过程: 将vel_integrator_gain增益设置为0 确保您的系统稳定。如果不是,请减少所有收益,直到获得收益为止。 vel_gain每次迭代增加约30%,直到电动机出现振动。 退回vel_gain至振动值的50%。 pos_gain每次迭代增加大约30%,直到看到一些过冲。 退缩,pos_gain直到没有超调为止。 积分器可以设置为0.5 * bandwidth * vel_gain,其中bandwidth是系统的总跟踪带宽。假设您的调整使它以100ms的建立时间(从设定值更改到系统到达新设定值的时间)跟踪命令;这意味着带宽为1 /(100ms)= 1 /(0.1s)= 10hz。在这种情况下,您应该设置vel_integrator_gain = 0.5 * 10 * vel_gain。
Comments

![[TEST] Odrive Motor Control](https://imager.clipsaver.ru/dntYSxTFm3c/max.jpg)

















