"Bundled Super-Coiled Polymer Artificial Muscles: Design, Characterization, and Modeling" скачать в хорошем качестве
"Bundled Super-Coiled Polymer Artificial Muscles: Design, Characterization, and Modeling"
7 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: "Bundled Super-Coiled Polymer Artificial Muscles: Design, Characterization, and Modeling" в качестве 4k
У нас вы можете посмотреть бесплатно "Bundled Super-Coiled Polymer Artificial Muscles: Design, Characterization, and Modeling" или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон "Bundled Super-Coiled Polymer Artificial Muscles: Design, Characterization, and Modeling" в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
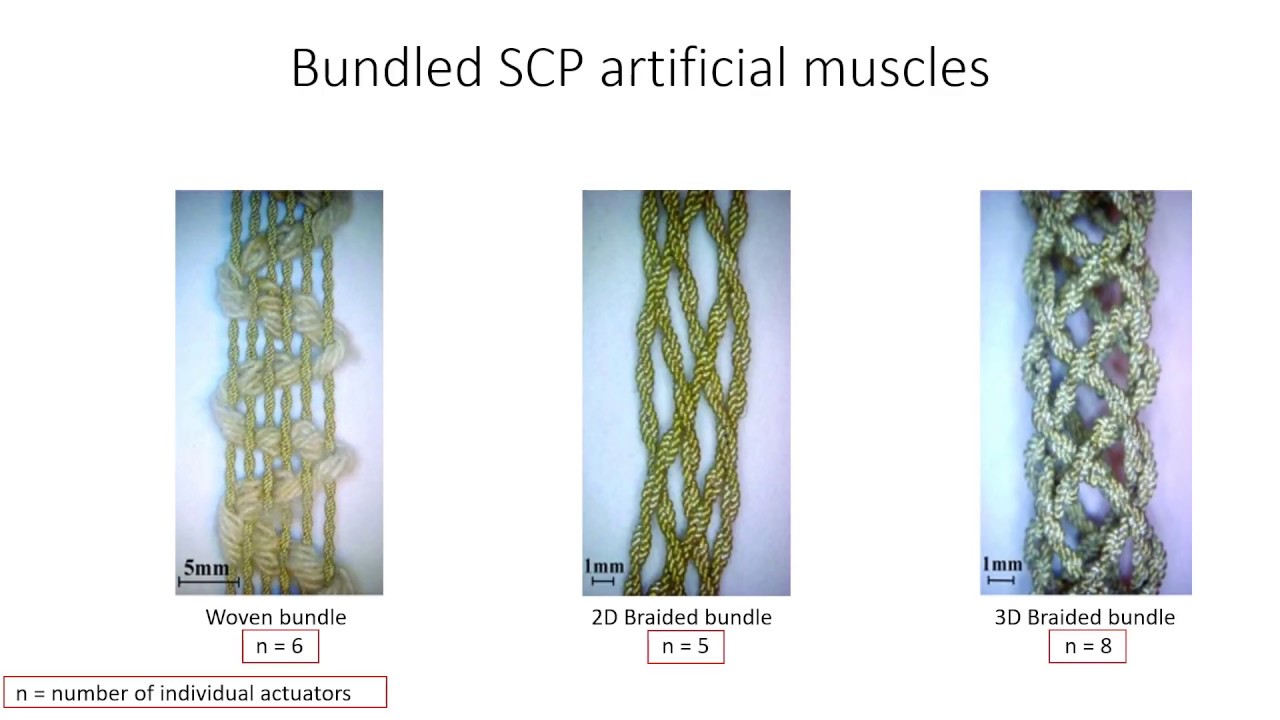
"Bundled Super-Coiled Polymer Artificial Muscles: Design, Characterization, and Modeling"
Super-coiled polymer (SCP) artificial muscles have many attractive properties such as high energy density, large contractions, and good dynamic range. To fully utilize them for robotic applications, it is necessary to determine how to scale them up effectively. Bundling of SCP actuators, as though they are individual threads in woven textiles, can demonstrate the versatility of SCP actuators and artificial muscles in general. However, this versatility comes with a need to understand how different bundling techniques can be achieved with these actuators and how they may trade off in performance. This paper presents the first quantitative comparison, analysis, and modeling of bundled SCP actuators. By exploiting weaving and braiding techniques, three new types of bundled SCP actuators are created: woven bundles, two-dimensional (2D) and three-dimensional (3D) braided bundles. The bundle performance is adjustable by employing different numbers of individual actuators. Experiments are conducted to characterize and compare the force, strain, and speed of different bundles, and a linear model is proposed to predict their performance. This work lays the foundation for model-based SCP-actuated textiles, and physically scaling robots that employ SCP actuators as the driving mechanism. Paper: https://ieeexplore.ieee.org/stamp/sta...
Comments

![[BizTech KOREA] Liquid Crystal Elastomer-based Artificial Muscles [#Lab_Tube]](https://imager.clipsaver.ru/PlCn4rRT-mE/max.jpg)