Holger Caesar: Autonomous vehicles from imperfect and limited labels скачать в хорошем качестве
Holger Caesar: Autonomous vehicles from imperfect and limited labels
3 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Holger Caesar: Autonomous vehicles from imperfect and limited labels в качестве 4k
У нас вы можете посмотреть бесплатно Holger Caesar: Autonomous vehicles from imperfect and limited labels или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Holger Caesar: Autonomous vehicles from imperfect and limited labels в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Holger Caesar: Autonomous vehicles from imperfect and limited labels
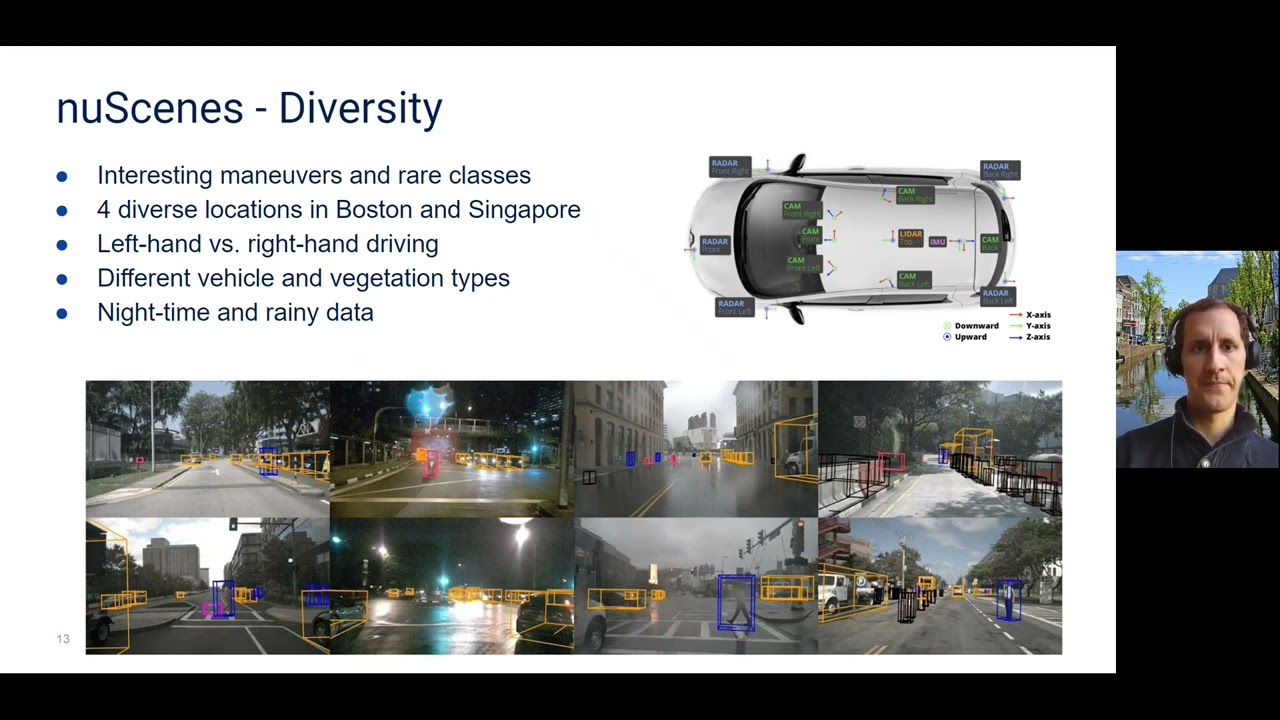
Abstract: The past decade has seen enormous progress in autonomous vehicle performance due to new sensors, large scale datasets and ever deeper models. Yet this progress is fueled by human annotators manually labeling every object in painstaking detail. Newly released datasets now focus on more specific subproblems rather than fully labelling ever larger amounts of data. In this talk I will talk about how we developed an Offline Perception system to autolabel a 250x times larger dataset called nuPlan. This dataset serves as the world's first real-world ML planning benchmark. By combining real-world data with a closed-loop simulation framework, we get the best of both world's - realism and reactivity. I will discuss the role of imperfect (perception) data in planning and prediction and highlight the importance of up-to-date maps. I conclude that it is essential to detect these imperfections, quantify their impact and develop robust models that are able to learn from this data. Bio: Dr. Holger Caesar is an Assistant Professor at the Intelligent Vehicles group of TU Delft in the Netherlands. Holger's research interests are in the area of Autonomous Vehicle perception and prediction, with a particular focus on scalability of learning and annotation approaches. Previously Holger was a Principal Research Scientist at an autonomous vehicle company called Motional (formerly nuTonomy). There he started 3 teams with 20+ members that focused on Data Annotation, Autolabeling and Data Mining. Holger also developed the influential autonomous driving datasets nuScenes and nuPlan and contributed to the commonly used PointPillars baseline for 3d object detection from lidar data. He received his PhD in Computer Vision from the University of Edinburgh in Scotland under Prof. Dr. Vittorio Ferrari and studied in Germany and Switzerland (KIT Karlsruhe, EPF Lausanne, ETH Zurich).
Comments



















