VTOL Simulation using MavProxy Gazebo, ArduPilot SITL and Mission Planner скачать в хорошем качестве
VTOL Simulation using MavProxy Gazebo, ArduPilot SITL and Mission Planner
3 недели назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: VTOL Simulation using MavProxy Gazebo, ArduPilot SITL and Mission Planner в качестве 4k
У нас вы можете посмотреть бесплатно VTOL Simulation using MavProxy Gazebo, ArduPilot SITL and Mission Planner или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон VTOL Simulation using MavProxy Gazebo, ArduPilot SITL and Mission Planner в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
VTOL Simulation using MavProxy Gazebo, ArduPilot SITL and Mission Planner
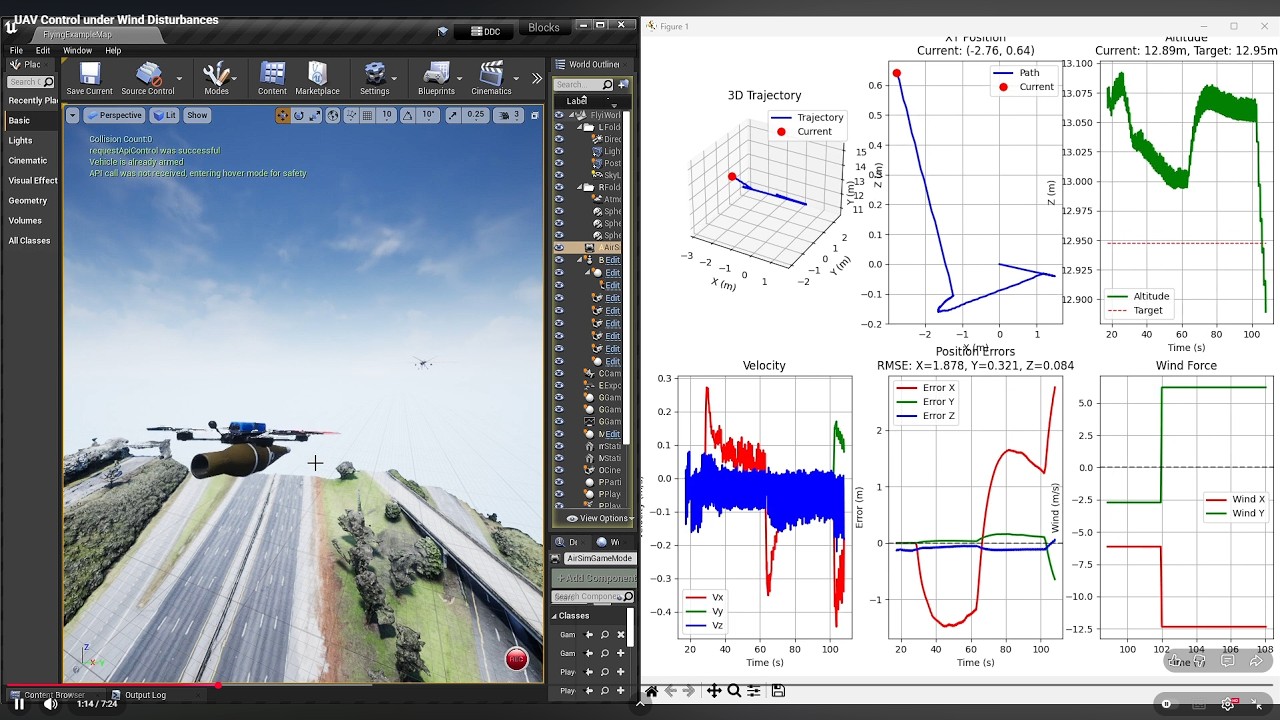
A full VTOL simulation was conducted using ArduPilot SITL integrated with Gazebo, where vehicle behavior was evaluated across autonomous takeoff, transition, mission execution, and landing phases. A complete mission was created and uploaded via Mission Planner, incorporating both auto takeoff and auto landing sequences. During the simulation, SERVO1 through SERVO8 outputs were analyzed using MAVProxy graph tools to examine actuator behavior, control allocation, and transition dynamics between multicopter and fixed-wing modes. The servo response plots were used to assess thrust distribution, transition mechanisms, and control surface activity, enabling validation of system stability and correct sequencing throughout the mission. This simulation-based analysis supported verification of VTOL control logic and mission performance prior to real-world testing.
Comments










![[ Lattice Planning_ ver2 ]](https://imager.clipsaver.ru/ylaCJDalVWY/max.jpg)


![SUPER BOWL LX FLYOVER [ Pilot Comms Included ]](https://imager.clipsaver.ru/t-RtJv29skk/max.jpg)