Maryland Robotics Center Seminar, November 22, 2024: Gaurav Sukhatme скачать в хорошем качестве
Maryland Robotics Center Seminar, November 22, 2024: Gaurav Sukhatme
1 год назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Maryland Robotics Center Seminar, November 22, 2024: Gaurav Sukhatme в качестве 4k
У нас вы можете посмотреть бесплатно Maryland Robotics Center Seminar, November 22, 2024: Gaurav Sukhatme или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Maryland Robotics Center Seminar, November 22, 2024: Gaurav Sukhatme в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Maryland Robotics Center Seminar, November 22, 2024: Gaurav Sukhatme
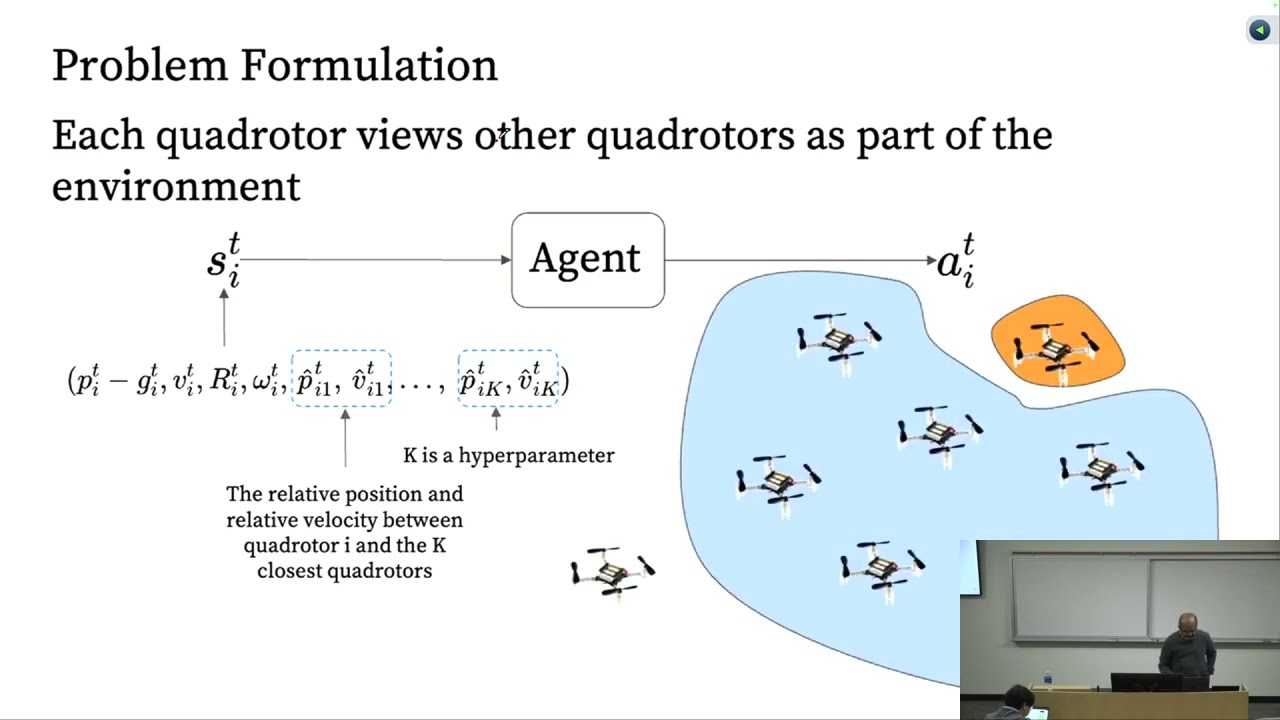
Maryland Robotics Center Seminar: Learning Coordinated Performant Flight with 20 Neurons Gaurav Sukhatme, Ph.D. Professor of Computer Science and Electrical Engineering Donald M. Aldstadt Chair in Advanced Computing Director, USC School of Advanced Computing University of Southern California We have recently demonstrated the possibility of learning controllers that are zero-shot transferable to groups of real quadrotors via large-scale, multi-agent, end-to-end reinforcement learning. We train policies parameterized by neural networks that can control individual drones in a group in a fully decentralized manner. Our policies, trained in simulated environments with realistic quadrotor physics, demonstrate advanced flocking behaviors, perform aggressive maneuvers in tight formations while avoiding collisions with each other, break and re-establish formations to avoid collisions with moving obstacles, and efficiently coordinate in pursuit-evasion tasks. The model learned in simulation transfers to highly resource-constrained physical quadrotors. Motivated by these results and the observation that neural control of memory-constrained, agile robots requires small yet highly performant models, the talk will conclude with some thoughts on coaxing learned models onto devices with modest computational capabilities. For more information on the Maryland Robotics Center see: https://robotics.umd.edu
Comments
-
 1 год назад
1 год назад
-
 1 год назад
1 год назад
-
 Трансляция закончилась 2 года назад
Трансляция закончилась 2 года назад
-
 14 лет назад
14 лет назад
-
 8 месяцев назад
8 месяцев назад
-
 8 часов назад
8 часов назад
-
 11 часов назад
11 часов назад
-
 5 дней назад
5 дней назад
-
 8 часов назад
8 часов назад
-
 2 дня назад
2 дня назад
-
 1 год назад
1 год назад
-
 9 часов назад
9 часов назад
-
![3. CS50 на русском: Лекция #3 [Гарвард, Основы программирования, осень 2015 год]](https://imager.clipsaver.ru/agdXnmEadCM/max.jpg) 9 лет назад
9 лет назад
-
 8 лет назад
8 лет назад
-
 8 месяцев назад
8 месяцев назад
-
 5 лет назад
5 лет назад
-
 2 месяца назад
2 месяца назад
-
 1 месяц назад
1 месяц назад
-
 Трансляция закончилась 1 год назад
Трансляция закончилась 1 год назад
-
 2 недели назад
2 недели назад