DOF - Degree of Freedom, Robot Configuration & White Collar Robot - Part 04 скачать в хорошем качестве
DOF - Degree of Freedom, Robot Configuration & White Collar Robot - Part 04
1 год назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: DOF - Degree of Freedom, Robot Configuration & White Collar Robot - Part 04 в качестве 4k
У нас вы можете посмотреть бесплатно DOF - Degree of Freedom, Robot Configuration & White Collar Robot - Part 04 или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон DOF - Degree of Freedom, Robot Configuration & White Collar Robot - Part 04 в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
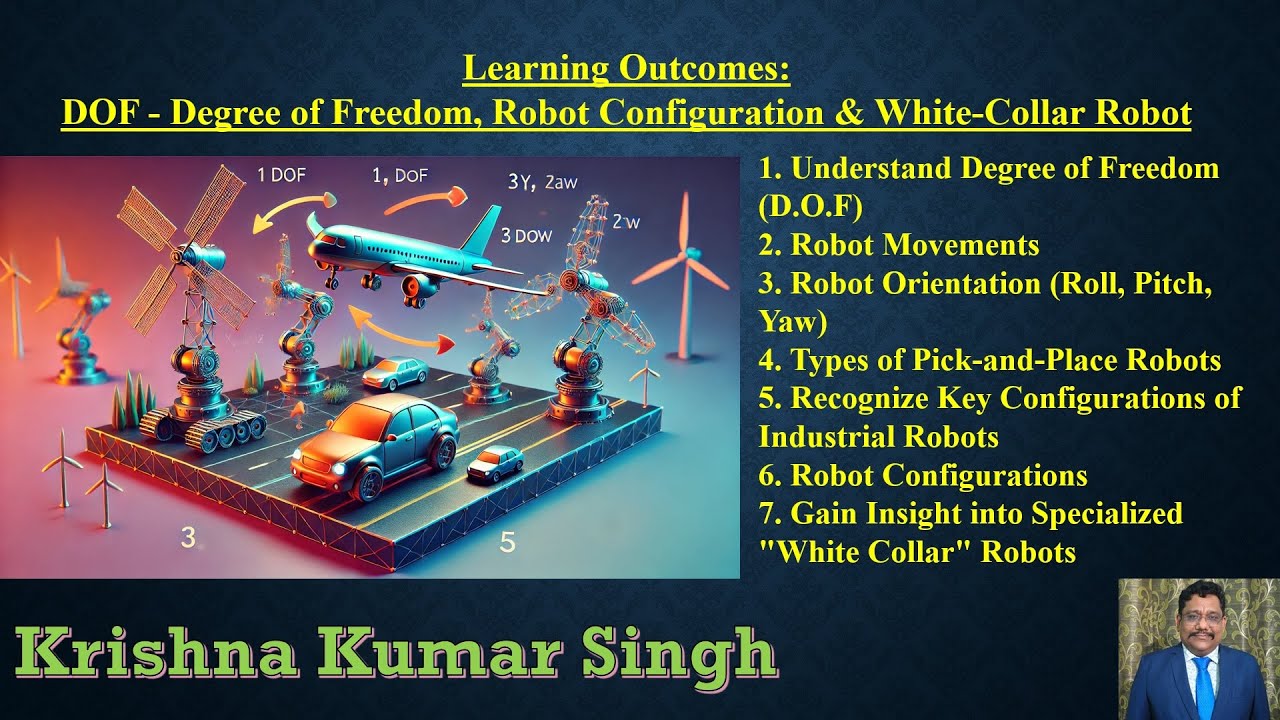
DOF - Degree of Freedom, Robot Configuration & White Collar Robot - Part 04
Degree of freedom (DoF) is fundamentally linked to the possible movements or motions a rigid body or a system can execute. Mathematically, the degree of freedom refers to the number of independent variables or coordinates required to ascertain the position and orientation of a system or its components. To simplify this concept, let's consider practical examples. Take a car traveling along a straight street. To understand how it moves, we only need to consider the distance it covers along the road. Here, the distance traveled is the single independent variable. Since only one independent variable defines the car's motion, we say the car has one degree of freedom. Similarly, consider a windmill. The windmill rotates around a fixed point. Its motion is described entirely by the angle through which it rotates. Again, only one independent variable, the angular displacement, defines its motion, giving it a single degree of freedom. Now, let’s explore a more complex example—an airplane. An airplane flying through three-dimensional space can move along three axes: up and down (Y-axis), forward and backward (X-axis), and side to side (Z-axis). Additionally, the airplane can rotate around these axes. Rotation around the Y-axis (nose up and down) is called pitch; rotation around the Z-axis (nose left and right) is yaw; rotation around the X-axis (wing up and down) is roll. Thus, the airplane’s position requires three translational (X, Y, Z) and three rotational (pitch, yaw, roll) variables, totaling six degrees of freedom. In robotics, the concept of degrees of freedom becomes essential as it defines how a robot moves and interacts with its environment. Typically, robots require multiple degrees of freedom to perform complex tasks. A robot with more degrees of freedom has greater flexibility and precision. Let’s explore common pick-and-place robots to better understand this concept: One-axis robot: Moves objects along a single straight line. It can only move objects linearly along a single axis. Two-axis robot: Can move an object along two axes, typically horizontal and vertical. It allows more versatility than a one-axis robot but is still limited to movement along a plane. Three-axis robot: Provides full spatial coverage, moving objects within the X, Y, and Z space. It can position objects anywhere within its reachable workspace but does not change the object’s orientation. Four-axis robot: Moves objects within 3D space and has one rotational motion. It can handle spatial positioning and limited orientation adjustments, commonly used in tasks requiring simple orientation changes. Five-axis robot: Capable of positioning objects in 3D space with two rotational movements. It controls pitch and yaw, enabling orientation adjustments for more precise positioning. Six-axis robot: Offers the most comprehensive movement capabilities. It can move objects anywhere within 3D space and adjust orientation along all three rotational axes (roll, pitch, yaw). This type of robot is widely used in complex applications such as assembly, welding, painting, and handling delicate tasks requiring precise orientation. Understanding these six-axis robots requires familiarity with concepts like roll, pitch, and yaw: Roll: Rotation around the X-axis, analogous to rolling from side to side. Pitch: Rotation around the Y-axis, similar to nodding up and down. Yaw: Rotation around the vertical Z-axis, similar to turning left or right. A deeper understanding of robotic configurations reveals how robots achieve these movements: Robotic Configurations: Rectangular or Cartesian Configuration: This configuration moves along three perpendicular axes (X, Y, Z). Commonly used for precise linear movements with sliding joints. Ideal for simple pick-and-place, machine loading, and material handling due to its high precision. Cylindrical Configuration: Involves two linear motions and one rotational motion. The base provides rotary motion, while vertical and horizontal motions are linear. Suitable for assembly tasks, machine loading, and operations requiring vertical stacking. Spherical or Polar Configuration: Has two rotational motions and one linear motion. The base rotation combined with arm rotation provides angular coverage, while a linear slide provides radial movement. Used for handling tasks needing spherical coverage like welding or spraying. Articulated Configuration: All joints are rotational, resembling a human arm (shoulder, elbow, wrist). Highly versatile, allowing precise positioning and orientation. Widely used in assembly lines, welding, painting, and handling diverse operations. Advanced Robots: To understand more complex robotic tasks, it is essential to grasp the workings of advanced six degrees of freedom robots, which we will explore in depth separately.
Comments