Поддержка ROS в манипуляторе UR: взгляд со стороны поставщика — Феликс Экснер — Universal Robots скачать в хорошем качестве
Поддержка ROS в манипуляторе UR: взгляд со стороны поставщика — Феликс Экснер — Universal Robots
1 день назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Поддержка ROS в манипуляторе UR: взгляд со стороны поставщика — Феликс Экснер — Universal Robots в качестве 4k
У нас вы можете посмотреть бесплатно Поддержка ROS в манипуляторе UR: взгляд со стороны поставщика — Феликс Экснер — Universal Robots или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Поддержка ROS в манипуляторе UR: взгляд со стороны поставщика — Феликс Экснер — Universal Robots в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Поддержка ROS в манипуляторе UR: взгляд со стороны поставщика — Феликс Экснер — Universal Robots
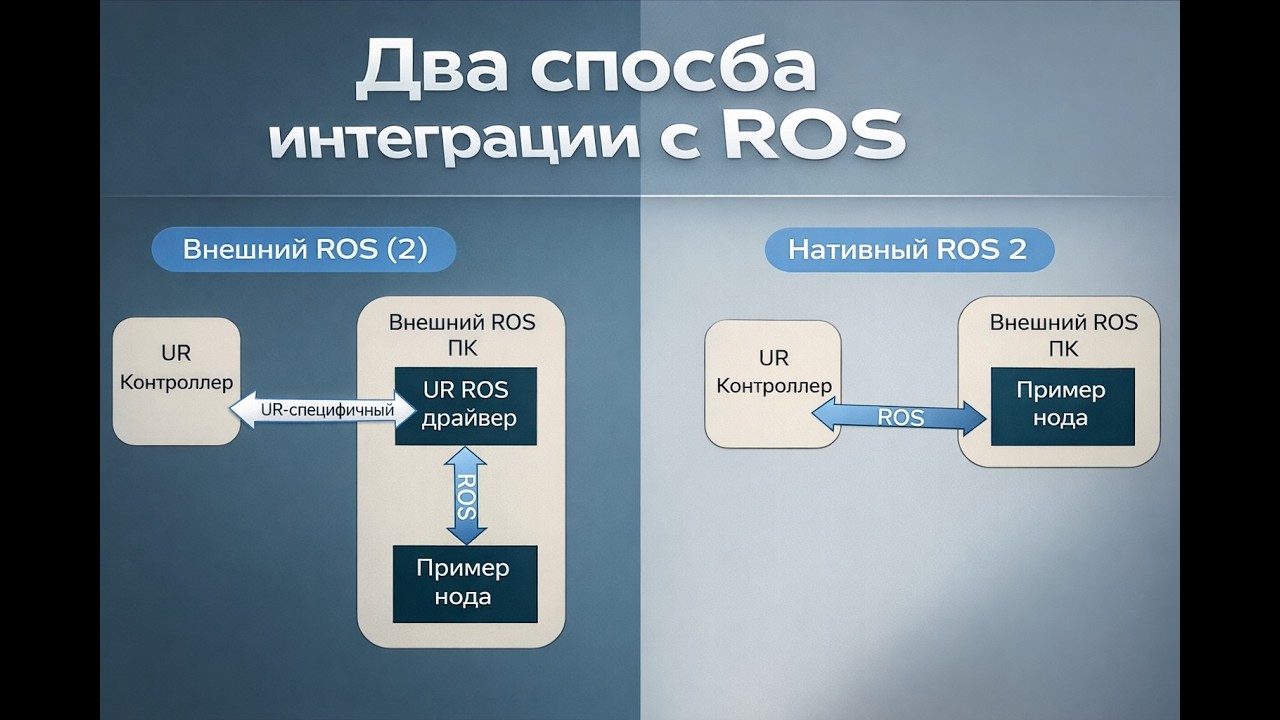
Сочетание гибкости такого проекта, как ROS, в промышленном контексте со специфическими требованиями к надежности, безопасности и долгосрочной поддержке порой может представлять собой сложную задачу. В этом докладе мы хотели бы осветить некоторые из этих проблем и то, как мы решаем их в контексте драйвера ROS от Universal Robots и нативной интеграции ROS. Мы представим наш подход к обеспечению надежности и стабильности в различных версиях ROS, ROS 2, а также в собственных аппаратных и программных версиях Universal Robots. Краткое содержание 00:00 Введение 00:37 Краткая история 01:43 Новости драйверов ROS 2: Прямое управление крутящим моментом и интерфейс команд управления усилием 03:18 Новости драйверов ROS 2: Контроллер примитивов движения 05:01 Поддержание стабильной экосистемы ROS: пакеты ROS 06:19 Поддержание стабильной экосистемы ROS: различные дистрибутивы ROS 07:59 Поддержание стабильной экосистемы ROS: унифицированная документация 08:30 Поддержание стабильной экосистемы ROS: разнообразие роботов/управления 10:45 Поддержание стабильной экосистемы ROS: гибкая экосистема 14:48 PolyscopeX: два способа интеграции с ROS 15:28 ROS с URCapX 16:23 Наличие ROS на контроллере робота 18:00 Краткое содержание: плюсы/минусы Ссылки Примеры URScript https://github.com/UniversalRobots/UR... Bridging the Разрыв между симуляцией и реальностью для приложений промышленной роботизированной сборки с использованием NVIDIA Isaac Lab https://developer.nvidia.com/blog/bri... Контроллеры примитивов движения https://control.ros.org/rolling/doc/r... Единая документация https://docs.universal-robots.com/Uni... Бэкенд ROS 2 на PolyscopeX https://docs.universal-robots.com/Pol... Обсудить можно в ROS чате https://t.me/rosrussia Канал по промышленной робототехнике https://t.me/rosindustrial
Comments



![Эффект Джанибекова [Veritasium]](https://imager.clipsaver.ru/N9HlQ-XVnFk/max.jpg)