OptiOdom: Square Calibration Path for Differential/Tricycle Robots скачать в хорошем качестве
OptiOdom: Square Calibration Path for Differential/Tricycle Robots
4 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: OptiOdom: Square Calibration Path for Differential/Tricycle Robots в качестве 4k
У нас вы можете посмотреть бесплатно OptiOdom: Square Calibration Path for Differential/Tricycle Robots или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон OptiOdom: Square Calibration Path for Differential/Tricycle Robots в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
OptiOdom: Square Calibration Path for Differential/Tricycle Robots
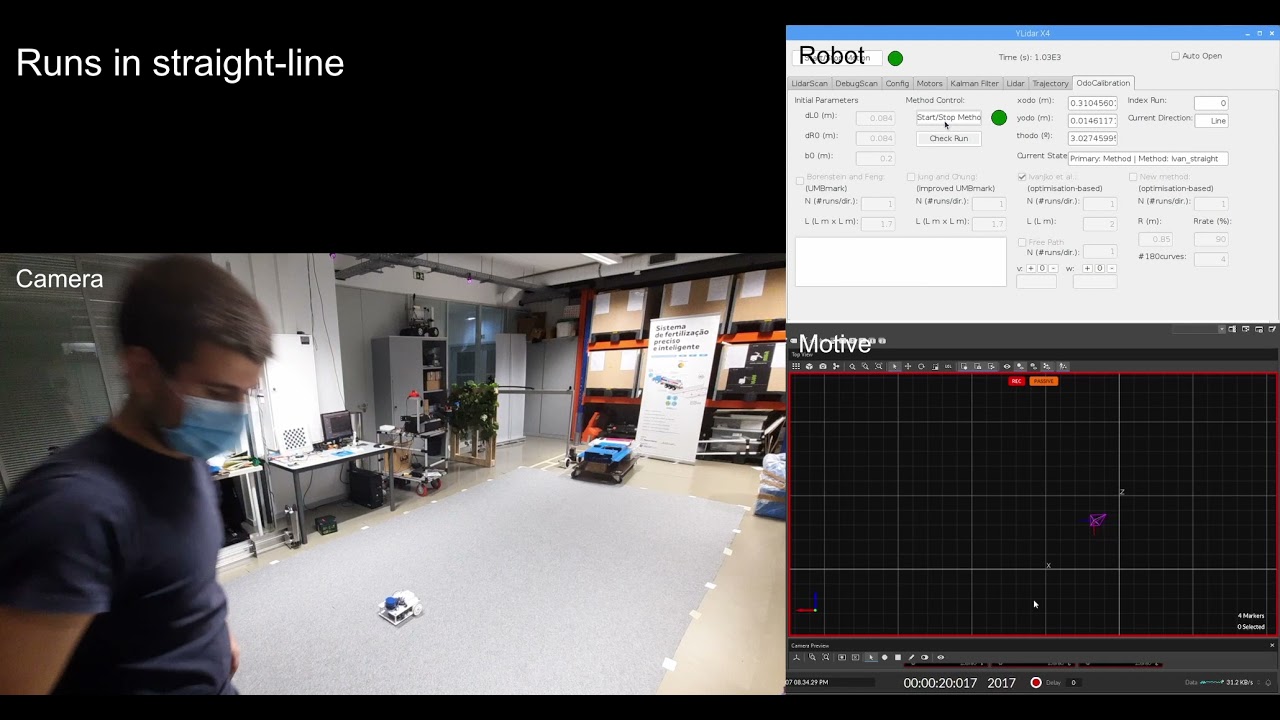
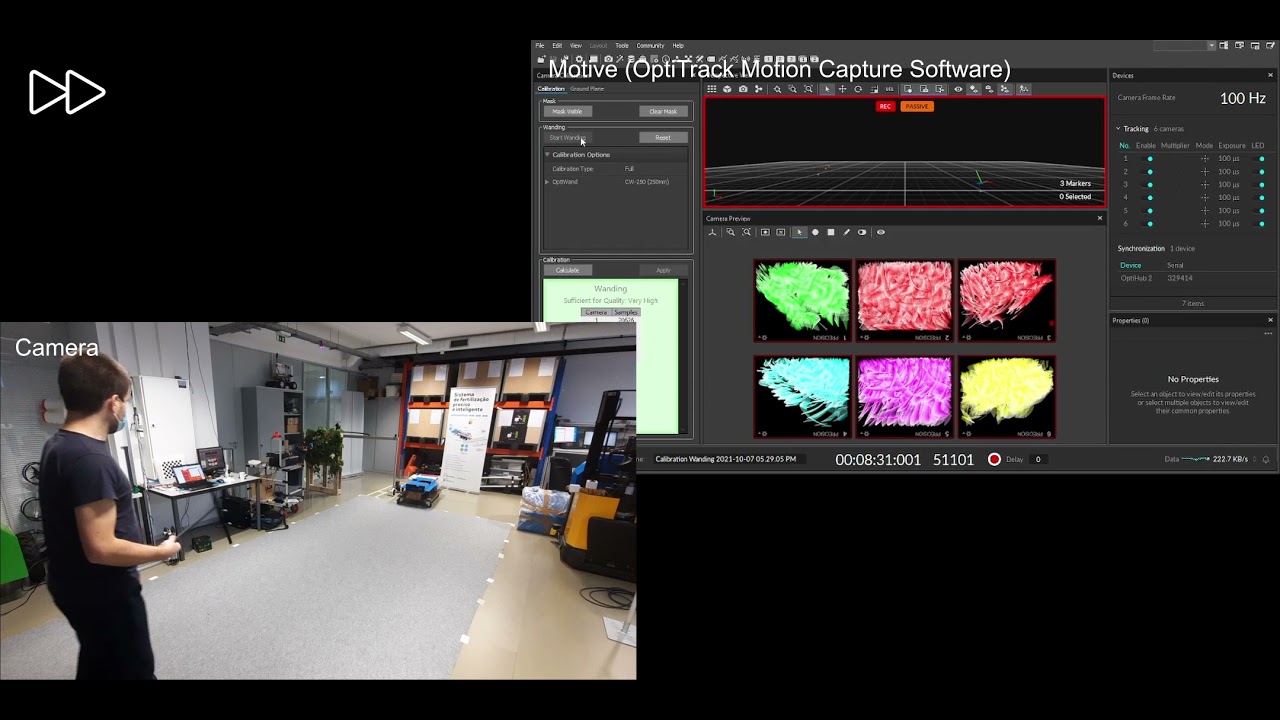
Square Calibration Path for Differential/Tricycle Robots This video presents the square calibration path used in OptiOdom's experiments for the differential and tricycle robots. The square calibration path is parameterized as follows: Side length of the square - L (m) Number of total runs - N Half of the runs should be performed in the clockwise direction and the other half in the opposite direction, as illustrated in the video. This procedure is required because only evaluating the odometric data in one direction can lead to odometric errors that cancel each other on a unidirectional path. In the literature, the square path was firstly proposed by Borenstein and Feng - The University of Michigan Benchmark (UMBmark) and later used in other works such as on Jung and Chung. Bibliographic references: Borenstein and Feng, "Measurement and correction of systematic odometry errors in mobile robots", doi: 10.1109/70.544770 Jung and Chung, "Accurate calibration of two wheel differential mobile robots by using experimental heading errors", doi: 10.1109/ICRA.2012.6224660 ---------------------------------------- OptiOdom: A Generic Approach for Odometry Calibration of Wheeled Mobile Robots Authors: Ricardo B. Sousa [orcid: 0000-0003-4537-5095] Marcelo R. Petry [orcid: 0000-0002-7023-8562] Paulo G. Costa [orcid: 0000-0002-4846-271X] António Paulo Moreira [orcid: 0000-0001-8573-3147] Acknowledgments: CRIIS - Centre for Robotics in Industry and Intelligent Systems from INESC TEC - Institute for Systems and Computer Engineering, Technology and Science Faculty of Engineering, University of Porto (FEUP)
Comments