Autonomous drone simulation using ROS and Gazebo @ UniBW Munich | Random tree environment скачать в хорошем качестве
Autonomous drone simulation using ROS and Gazebo @ UniBW Munich | Random tree environment
3 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Autonomous drone simulation using ROS and Gazebo @ UniBW Munich | Random tree environment в качестве 4k
У нас вы можете посмотреть бесплатно Autonomous drone simulation using ROS and Gazebo @ UniBW Munich | Random tree environment или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Autonomous drone simulation using ROS and Gazebo @ UniBW Munich | Random tree environment в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
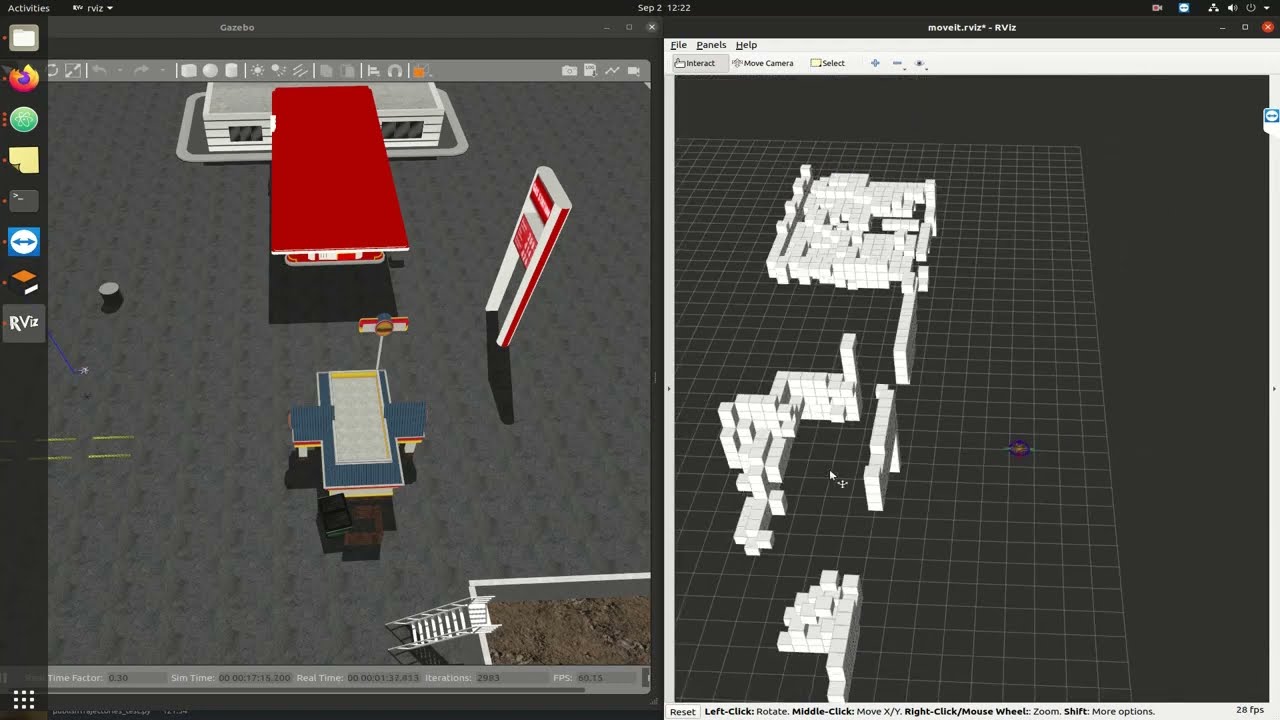
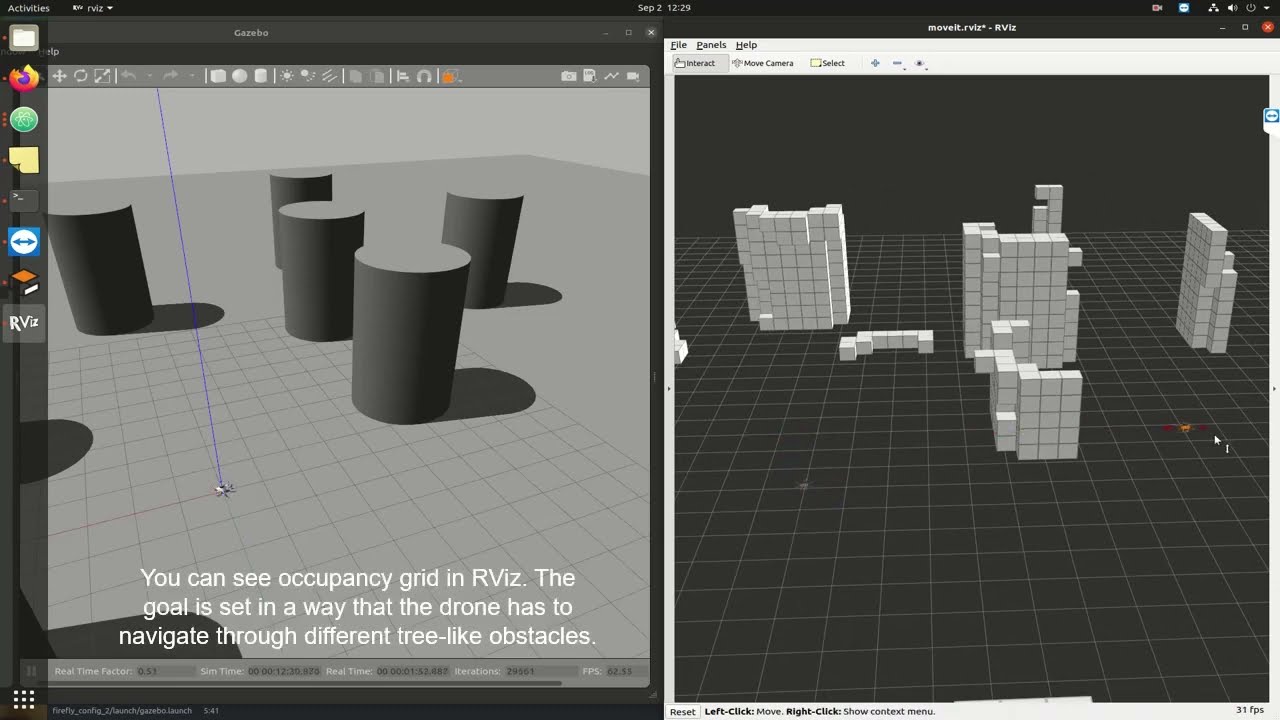
Autonomous drone simulation using ROS and Gazebo @ UniBW Munich | Random tree environment
The work integrates the popular RotorS simulator platform [1] developed at ETH Zurich and the planning ROS package MoveIt! We also add appropriate lidar sensors for 360-degree information of the environment. Additionally, a local mapper and a local trajectory generator are added derived from ideas in [2], [3]. The simulation environment is fully open source. Email for further information: mahathi.bhargavapuri@unibw.de This simulation was performed at the University of the Federal Armed Forces, Munich by Mahathi Bhargavapuri and Gunther Reissig. This work is partially funded by the European Leadership Joint Undertaking (ECSEL JU), under grant agreement No. 876019, the ADACORSA project - Airborne Data Collection on Resilient System Architectures. [1] F. Furrer, M. Burri, M. Achtelik, and R. Siegwart, Robot Operating System (ROS): The Complete Reference (Volume 1). Cham: Springer International Publishing, 2016, ch. RotorS—A Modular Gazebo MAV Simulator Framework, pp. 595–625. [2] M. Ryll, J. Ware, J. Carter, and N. Roy, “Efficient trajectory planning for high-speed flight in unknown environments,” in 2019 International conference on robotics and automation (ICRA). IEEE, 2019, pp. 732–738. [3] J. Tordesillas, B. T. Lopez, and J. P. How, “FASTER: Fast and safe trajectory planner for flights in unknown environments,” in 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2019.
Comments