Rapid Mismatch Estimation via Neural Network Informed Variational Inference скачать в хорошем качестве
Rapid Mismatch Estimation via Neural Network Informed Variational Inference
5 месяцев назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Rapid Mismatch Estimation via Neural Network Informed Variational Inference в качестве 4k
У нас вы можете посмотреть бесплатно Rapid Mismatch Estimation via Neural Network Informed Variational Inference или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Rapid Mismatch Estimation via Neural Network Informed Variational Inference в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Rapid Mismatch Estimation via Neural Network Informed Variational Inference
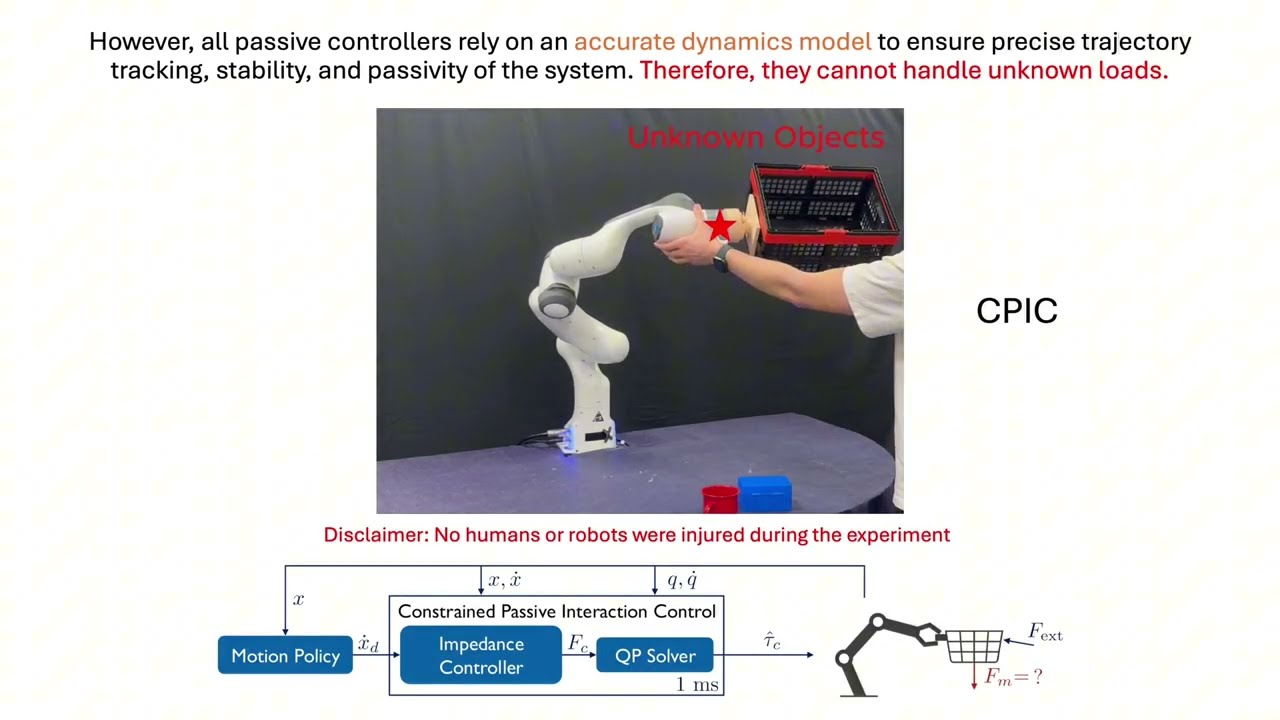
https://mateusz-jaszczuk.github.io/rme/ With robots increasingly operating in human-centric environments, ensuring soft and safe physical interactions, whether with humans, surroundings, or other machines, is essential. While compliant hardware can facilitate such interactions, this work focuses on impedance controllers that allow torque-controlled robots to safely and passively respond to contact while accurately executing tasks. From inverse dynamics to quadratic programming based controllers, the effectiveness of these methods relies on accurate dynamics models of the robot and the object it manipulates. Any model mismatch results in task failures and unsafe behaviors. Thus, we introduce Rapid Mismatch Estimation (RME), an adaptive, controller-agnostic, probabilistic framework that estimates end-effector dynamics mismatches online, without relying on external force-torque sensors. From the robot's proprioceptive feedback, a Neural Network Model Mismatch Estimator generates a prior for a Variational Inference solver, which rapidly converges to the unknown parameters while quantifying uncertainty. With a real 7-DoF manipulator driven by a state-of-the-art passive impedance controller, RME adapts to sudden changes in mass and center of mass at the end-effector in ~400 ms, in static and dynamic settings. We demonstrate RME in a collaborative scenario where a human attaches an unknown basket to the robot's end-effector and dynamically adds/removes heavy items, showcasing fast and safe adaptation to changing dynamics during physical interaction without any external sensory system.
Comments





![Почему реактивный двигатель не плавится? [Veritasium]](https://imager.clipsaver.ru/F6UB0V2Fct4/max.jpg)













