XSEL Software Training with TTA Table Top Robot - IAI Electric Actuator Manufacturer скачать в хорошем качестве
XSEL Software Training with TTA Table Top Robot - IAI Electric Actuator Manufacturer
11 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: XSEL Software Training with TTA Table Top Robot - IAI Electric Actuator Manufacturer в качестве 4k
У нас вы можете посмотреть бесплатно XSEL Software Training with TTA Table Top Robot - IAI Electric Actuator Manufacturer или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон XSEL Software Training with TTA Table Top Robot - IAI Electric Actuator Manufacturer в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
XSEL Software Training with TTA Table Top Robot - IAI Electric Actuator Manufacturer
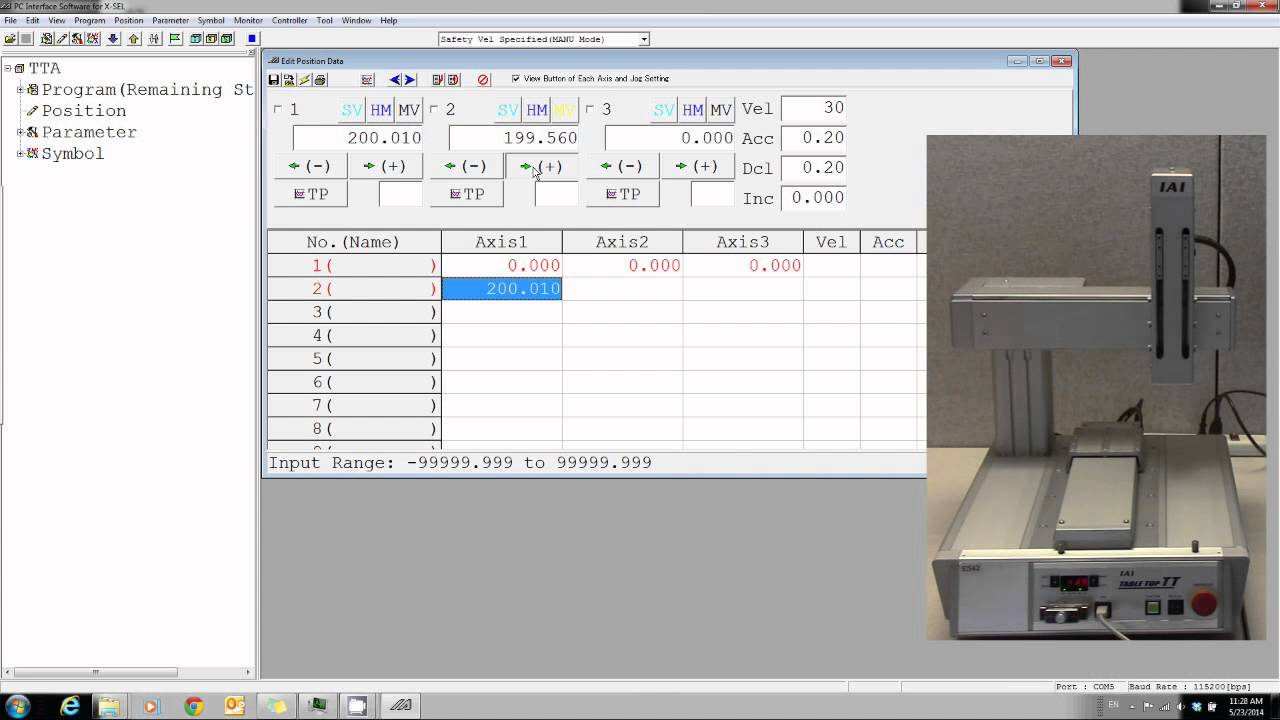
XSEL Software Training with TTA Table Top Robot - IAI Electric Actuator Manufacturer, http://www.intelligentactuator.com/x-... Easy to learn how to use XSEL Software. Focus on Program and Position (Data Table). 1: Program Input to the program data sheet in the PC software all necessary commands in the "SEL language" (IAI's original language) that instruct the details and sequence of operations. 2: Postion (Data Table) Determine the positions to move the robot to, and input them to the position data sheet in the PC software as coordinates. TTA: Multi-Axes Table Top Robot Improved Tabletop Robot for Cell Production Applications, Featuring Significantly Higher Payload, Maximum Speed and Rigidity! 1: Significantly Higher Payload and Maximum Speed 2: Stores Much More Programs and Positions The larger memory lets you store much more programs and positions. The additional data recovery function makes sure the original data can be restored should writing to a FLASH drive fails due to a power failure. 3: Three Times As Many I/O Points As Conventional Models When the standard I/O slot isn't enough, up to two additional expansion I/O slots can be installed. 4: Variations Four operating ranges are available to choose from. The 3-axis specification is available in two types of Z-axis strokes: 100mm and 150mm. You can select a model ideal for the size of your work part. Additional options let you change the Y-axis height and position. 5: Greater Bending Rigidity is Achieved by Integrating the Structure of the Y-axis Base with the Mounting Bracket. 6: Labyrinth Structure to Suppress Intrusion of Foreign Matter into X-axis The X-axis opening is structured as a labyrinth in order to make it difficult for foreign matter dropping onto the actuator (such as screws, molten metal, dust, etc.) to enter the X-axis. This expands the types of work environment supported.
Comments
-
 11 лет назад
11 лет назад
-
 12 лет назад
12 лет назад
-
 15 лет назад
15 лет назад
-
 5 лет назад
5 лет назад
-
 11 лет назад
11 лет назад
-
 4 дня назад
4 дня назад
-
 13 лет назад
13 лет назад
-
 1 год назад
1 год назад
-
 2 месяца назад
2 месяца назад
-
 4 года назад
4 года назад
-
 5 месяцев назад
5 месяцев назад
-
 4 года назад
4 года назад
-
 Трансляция закончилась 4 часа назад
Трансляция закончилась 4 часа назад
-
 Трансляция закончилась 10 дней назад
Трансляция закончилась 10 дней назад
-
 10 месяцев назад
10 месяцев назад
-
 14 лет назад
14 лет назад
-
 1 месяц назад
1 месяц назад
-
 12 лет назад
12 лет назад
-
![Divine Music - The Year Mix Vol.10 [Chill & Ethnic Deep 2025]](https://imager.clipsaver.ru/Q3XBH_FhuKY/max.jpg) 3 месяца назад
3 месяца назад
-
 1 год назад
1 год назад