Complex In-Hand Manipulation via Compliance-Enabled Finger Gaiting and Multi-Modal Planning скачать в хорошем качестве
Complex In-Hand Manipulation via Compliance-Enabled Finger Gaiting and Multi-Modal Planning
3 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Complex In-Hand Manipulation via Compliance-Enabled Finger Gaiting and Multi-Modal Planning в качестве 4k
У нас вы можете посмотреть бесплатно Complex In-Hand Manipulation via Compliance-Enabled Finger Gaiting and Multi-Modal Planning или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Complex In-Hand Manipulation via Compliance-Enabled Finger Gaiting and Multi-Modal Planning в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
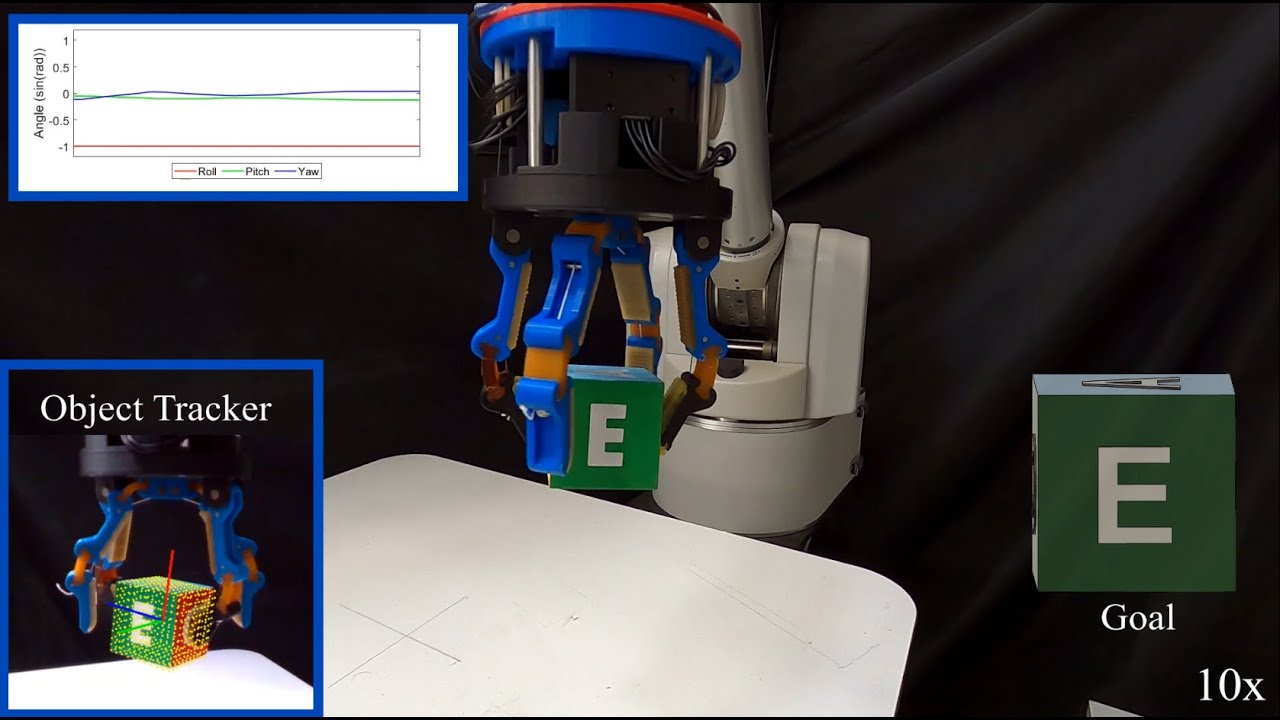
Complex In-Hand Manipulation via Compliance-Enabled Finger Gaiting and Multi-Modal Planning
Authors: Andrew Morgan*, Kaiyu Hang*, Bowen Wen, Kostas Bekris, and Aaron Dollar Journal: IEEE Robotics and Automation Letters, 2022 (to be presented at ICRA 2022 in Philadelphia, PA, USA) Letter available: https://ieeexplore.ieee.org/document/... Preprint available: https://arxiv.org/abs/2201.07928 Abstract: Constraining contacts to remain fixed on an object during manipulation limits the potential workspace size, as motion is subject to the hand's kinematic topology. Finger gaiting is one way to alleviate such restraints. It allows contacts to be freely broken and remade so as to operate on different manipulation manifolds. This capability, however, has traditionally been difficult or impossible to practically realize. A finger gaiting system must simultaneously plan for and control forces on the object while maintaining stability during contact switching. This work alleviates the traditional requirement by taking advantage of system compliance, allowing the hand to more easily switch contacts while maintaining a stable grasp. Our method achieves complete SO(3) finger gaiting control of grasped objects against gravity by developing a manipulation planner that operates via orthogonal safe modes of a compliant, underactuated hand absent of tactile sensors or joint encoders. During manipulation, a low-latency 6D pose object tracker provides feedback via vision, allowing the planner to update its plan online so as to adaptively recover from trajectory deviations. The efficacy of this method is showcased by manipulating both convex and non-convex objects on a real robot. Its robustness is evaluated via perturbation rejection and long trajectory goals. To the best of the authors' knowledge, this is the first work that has autonomously achieved full SO(3) control of objects within-hand via finger gaiting and without a support surface, elucidating a valuable step towards realizing true robot in-hand manipulation capabilities.
Comments










![Как сжимаются изображения? [46 МБ ↘↘ 4,07 МБ] JPEG в деталях](https://image.4k-video.ru/id-video/Kv1Hiv3ox8I)








