ITECH M.Sc. 2019: Spatial Winding скачать в хорошем качестве
ITECH M.Sc. 2019: Spatial Winding
6 дней назад
icd
itech
unistuttgart
stuttgart
architecture
madeinitech
computationaldesign
digitalfabrication
robotics
spatialwinding
multi-robotfabrication
heterogeneousrobotics
filamentwinding
spaceframestructures
roboticconstruction
adaptiveframedesign
CNCgantrysystem
carbonfibercomposites
iterativecuringprocess
carbonfibre
fibers
carbon
lightweight
CNC
roboticfabrication
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: ITECH M.Sc. 2019: Spatial Winding в качестве 4k
У нас вы можете посмотреть бесплатно ITECH M.Sc. 2019: Spatial Winding или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон ITECH M.Sc. 2019: Spatial Winding в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
ITECH M.Sc. 2019: Spatial Winding
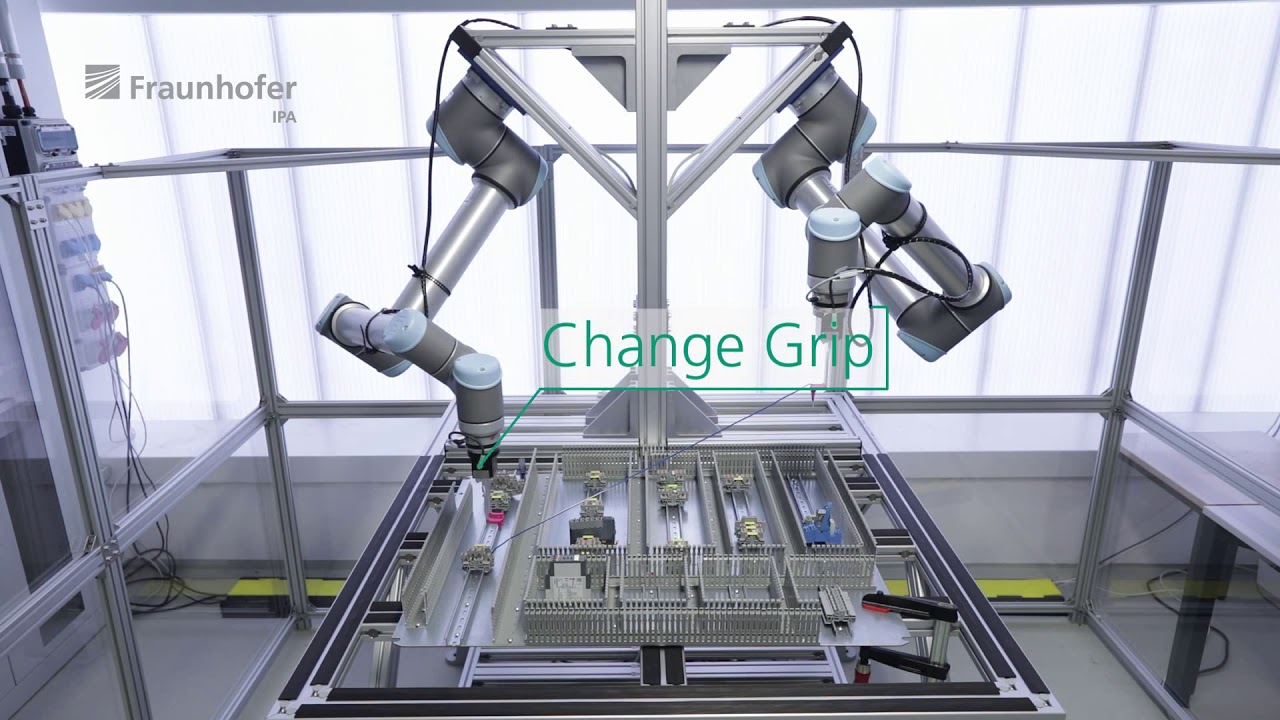
Spatial Winding: Cooperative Heterogeneous Multi-Robot System for Fibrous Structures, ITECH M.Sc. Thesis Project 2019 Rebeca Duque Estrada and Fabian Kannenberg Thesis Advisers: Hans-Jakob Wagner, Maria Yablonina Thesis Supervisor: Prof. Achim Menges (ICD) Second Supervisor: Prof. Jan Knippers (ITKE) This research presents the development of a cooperative heterogeneous multi-robot fabrication system for the spatial winding of filament materials. The system is based on the cooperation of a six-axis robotic arm and a customized 2+2 axis CNC gantry system. Heterogeneous multi-robot cooperation allows to deploy the strategy of Spatial Winding: a new method of sequential spatial fiber arrangement, based on directly interlocking filament-filament connections, achieved through wrapping one filament around another. This strategy allows to create a novel typology of lightweight non-regular fibrous space frame structures. The development of new syntax logics and rules was informed by geometric dependencies and fabrication-driven constraints, and a catalog of syntax strategies was explored through physical models and digital simulations. Computational design tools were developed to simulate the interdependent material behavior and structurally inform the created artifacts. An adaptable frame setup was developed which allows the fabrication of a variety of geometries within the same frame. By introducing a multi-step curing process that integrates with the adaptable frame, the iterative production of continuous large-scale spatial frame structures is possible. This makes the structure's scale agnostic of robotic reach and reduces the necessary formwork to the bare minimum. Through leveraging the capacities of two cooperating machines, the system allows to counteract some of their limitations. A flexible, dynamic, and collaborative fabrication system is presented as a strategy to tailor the fiber in space and expand the design possibilities of lightweight fiber structures. The artifact of the proposed fabrication process is a direct expression of the material tectonics and the robotic fabrication system. For more info: https://www.icd.uni-stuttgart.de/teac...
Comments