ICRA21: Learning-based Bias Correction for TDOA UWB Localization of Resource-constrained Robots скачать в хорошем качестве
ICRA21: Learning-based Bias Correction for TDOA UWB Localization of Resource-constrained Robots
4 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: ICRA21: Learning-based Bias Correction for TDOA UWB Localization of Resource-constrained Robots в качестве 4k
У нас вы можете посмотреть бесплатно ICRA21: Learning-based Bias Correction for TDOA UWB Localization of Resource-constrained Robots или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон ICRA21: Learning-based Bias Correction for TDOA UWB Localization of Resource-constrained Robots в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
ICRA21: Learning-based Bias Correction for TDOA UWB Localization of Resource-constrained Robots
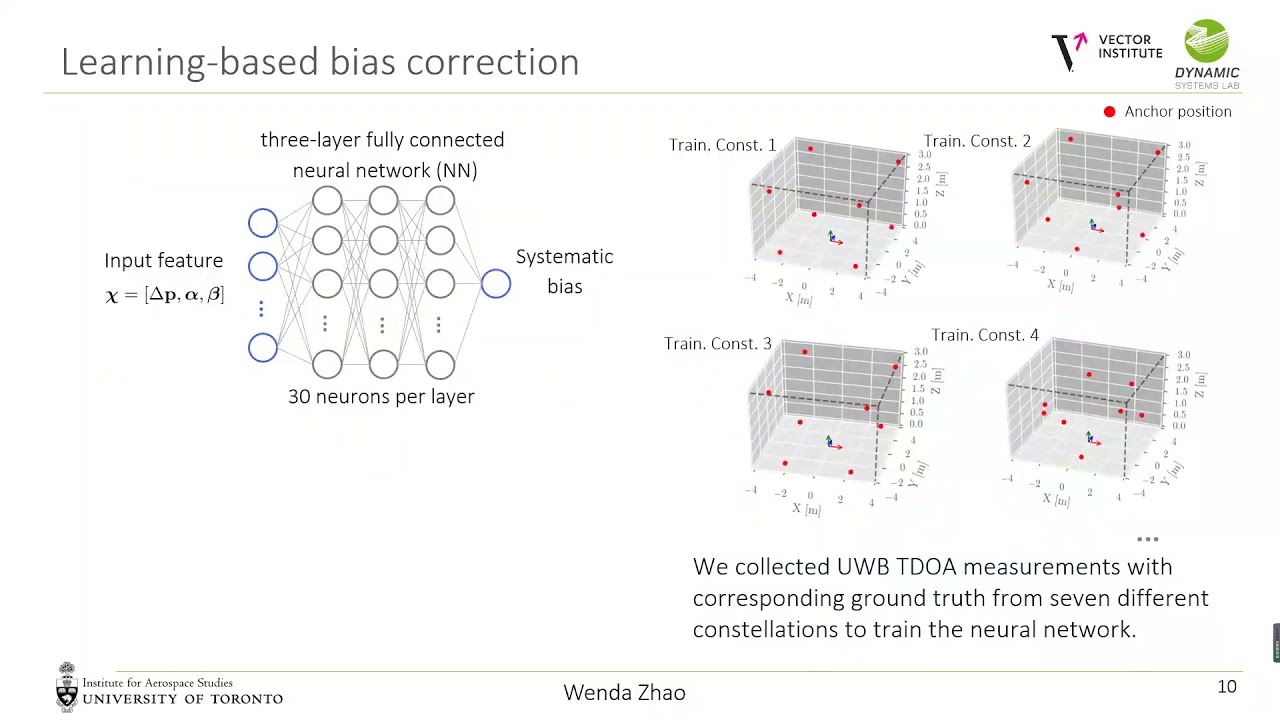
Full ICRA 2021 Talk Looking for a lightweight and low-cost localization solution? Have a look of our recent work on ultra-wideband (UWB) positioning systems. With a pre-trianed neural network bias model and a robust Kalman filter, our proposed localization framework provides an average of 42% localization error reduction compared to the baseline without bias correction on-board a 27g nano-quadcopter. Paper: https://www.dynsyslab.org/wp-content/... Researchers: Wenda Zhao, Jacopo Panerati, and Angela P. Schoellig For more information: www.dynsyslab.org
Comments