Leader-Follower 3D formation for Underwater Robots (DARS 2024) скачать в хорошем качестве
Leader-Follower 3D formation for Underwater Robots (DARS 2024)
1 год назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Leader-Follower 3D formation for Underwater Robots (DARS 2024) в качестве 4k
У нас вы можете посмотреть бесплатно Leader-Follower 3D formation for Underwater Robots (DARS 2024) или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Leader-Follower 3D formation for Underwater Robots (DARS 2024) в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
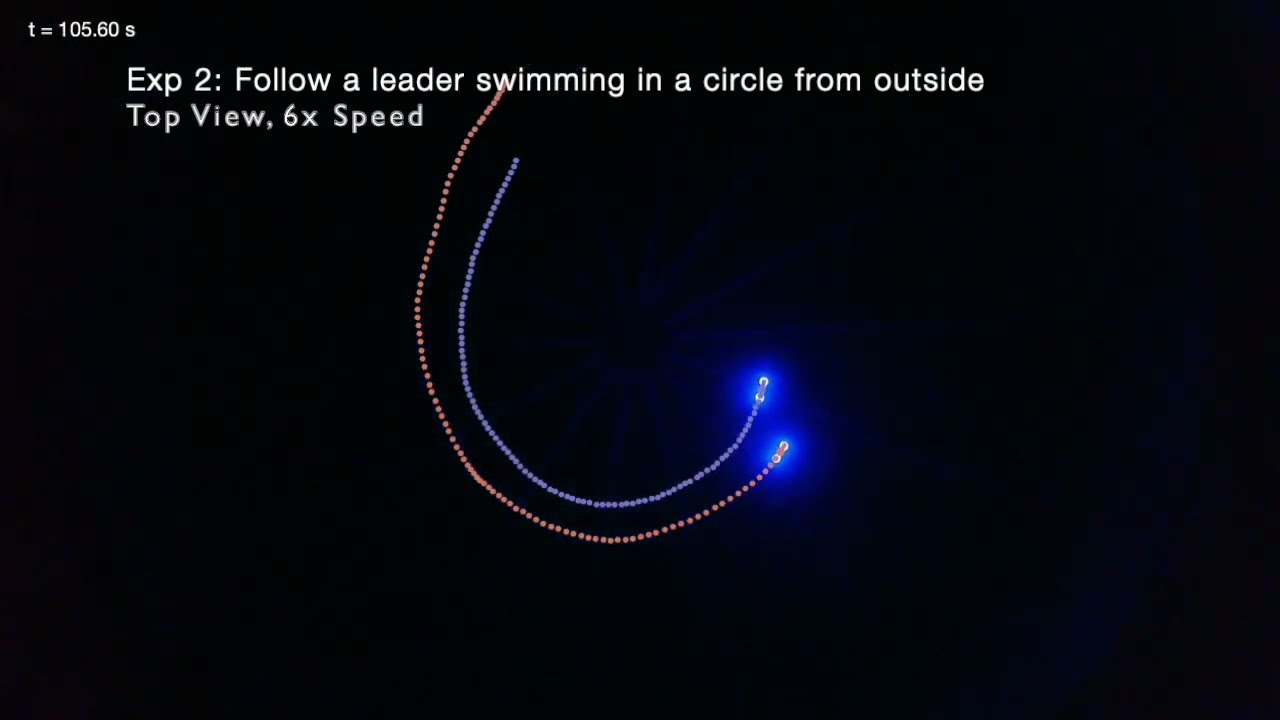
Leader-Follower 3D formation for Underwater Robots (DARS 2024)
This video accompanies our DARS 2024 paper (Distributed Autonomous Robotic Systems) which is available The schooling behavior of fish is hypothesized to confer many survival benefits, including foraging success, safety from predators, and energy savings through hydrodynamic interactions when swimming in formation. Underwater robot collectives may be able to achieve similar benefits in future applications, e.g. using formation control to achieve efficient spatial sampling for environmental monitoring. Here we introduce a leader-follower strategy for underwater formation control that allows us to realize complex 3D formations, using purely vision-based perception and a reactive control algorithm that is low computation. We use a physical platform, BlueSwarm, to demonstrate for the first time an experimental realization of inline, side-by-side, and stag- gered swimming 3D formations. More complex formations are studied in a physics-based simulator. Our findings lay the groundwork for future applications of underwater robot swarms in aquatic environments with minimal communication.
Comments





![Пожалуй, главное заблуждение об электричестве [Veritasium]](https://imager.clipsaver.ru/6Hv2GLtnf2c/max.jpg)












