Visual 3D Terrain Mapping by a Robotic Helicopter скачать в хорошем качестве
Visual 3D Terrain Mapping by a Robotic Helicopter
10 месяцев назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Visual 3D Terrain Mapping by a Robotic Helicopter в качестве 4k
У нас вы можете посмотреть бесплатно Visual 3D Terrain Mapping by a Robotic Helicopter или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Visual 3D Terrain Mapping by a Robotic Helicopter в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
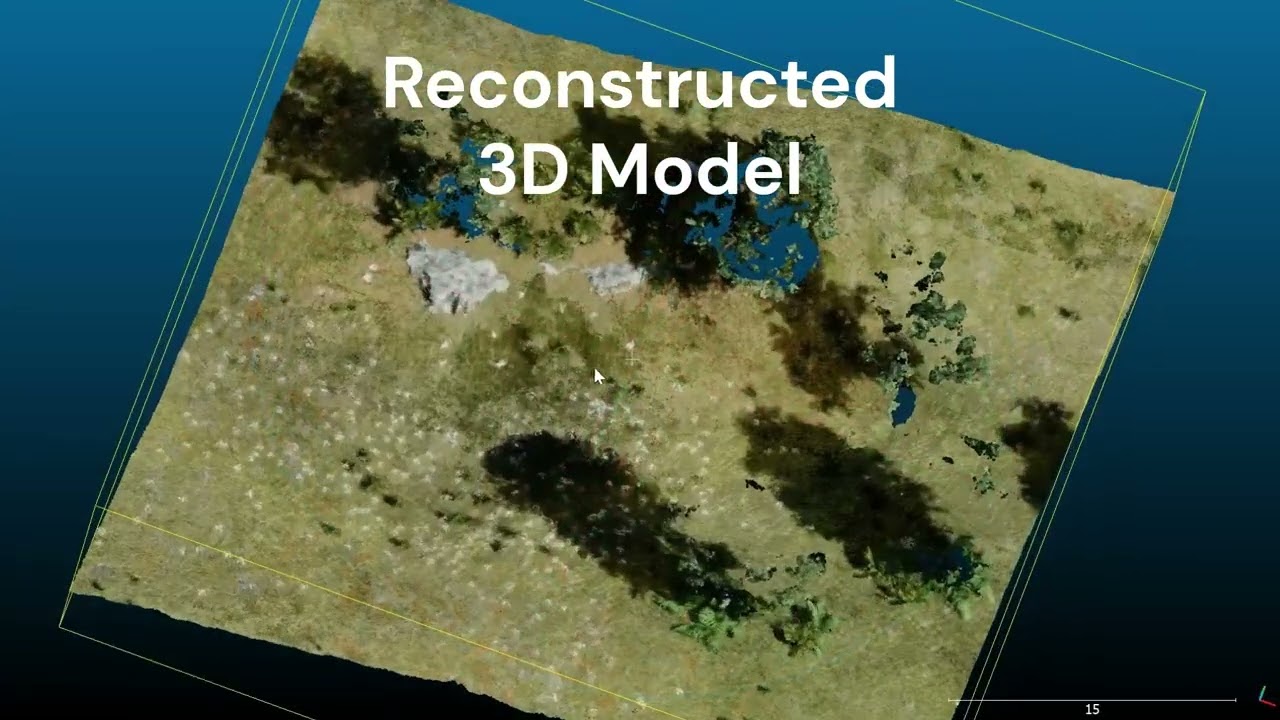
Visual 3D Terrain Mapping by a Robotic Helicopter
This is a visualization of my Bachelor Thesis. The goal was to implement a system capable of generating a 3D terrain model from images captured by an autonomous quadcopter. This model could then be used for near-surface obstacle avoidance and navigation. The system first commands a drone to fly over the terrain and capture a grid of RGB images. These images are then processed by photogrammetry software to reconstruct the 3D scene. Using an onboard GPS antenna, the 3D model is geolocated, enabling its use in subsequent navigation taks. To allow efficient near-surface navigation, the 3D model is reduced to a 2D heightmap. Using this heightmap, the drone finds the lowest-cost path between any two points using the A* algorithm. The implementation was developed and tested using the AirSim simulator, based on Unreal Engine. Code Link: https://github.com/TichyTech/AirSimCloud
Comments