Mobile Robot Docking Simulation | RANSAC Feature Detection Under Harsh Disturbances скачать в хорошем качестве
Mobile Robot Docking Simulation | RANSAC Feature Detection Under Harsh Disturbances
2 недели назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Mobile Robot Docking Simulation | RANSAC Feature Detection Under Harsh Disturbances в качестве 4k
У нас вы можете посмотреть бесплатно Mobile Robot Docking Simulation | RANSAC Feature Detection Under Harsh Disturbances или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Mobile Robot Docking Simulation | RANSAC Feature Detection Under Harsh Disturbances в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
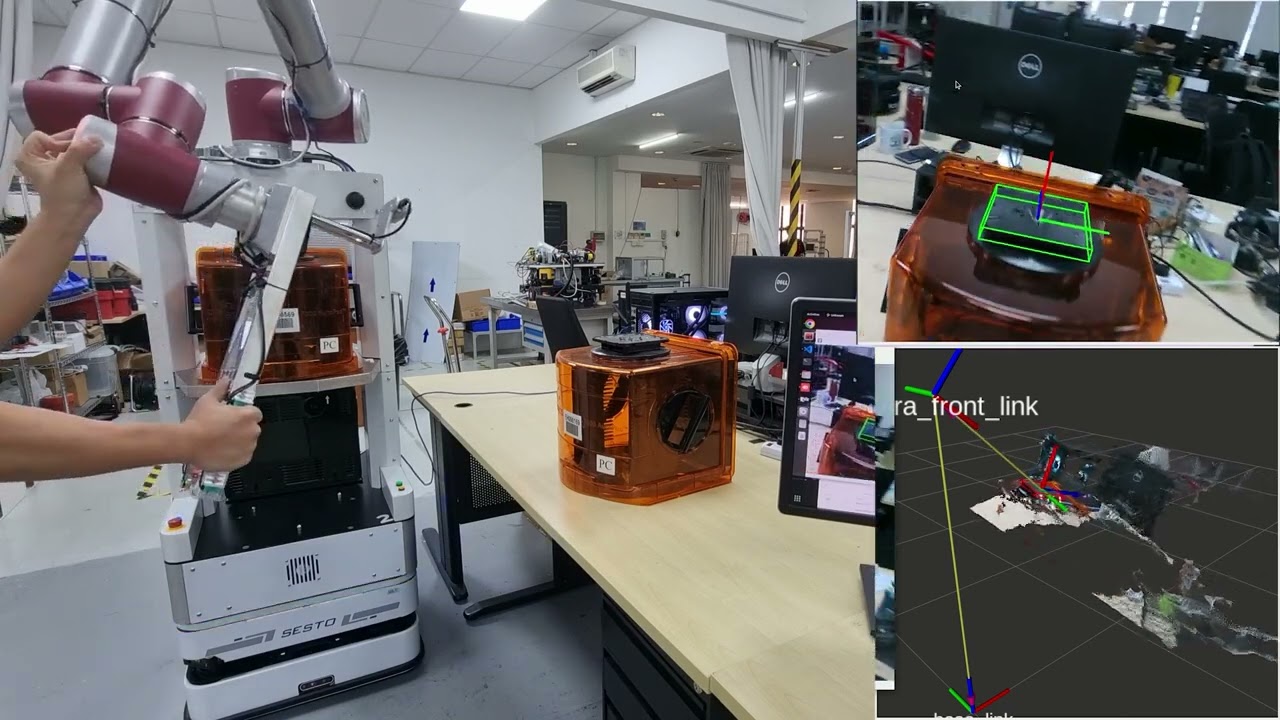
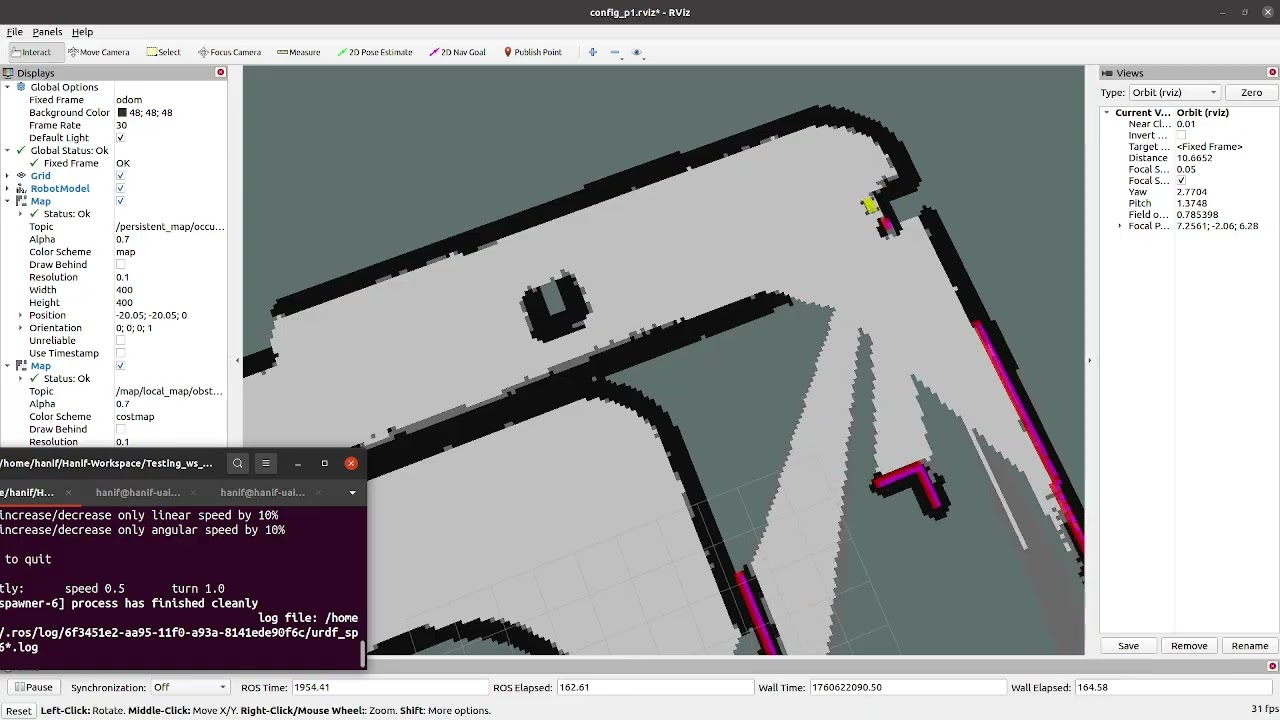
Mobile Robot Docking Simulation | RANSAC Feature Detection Under Harsh Disturbances
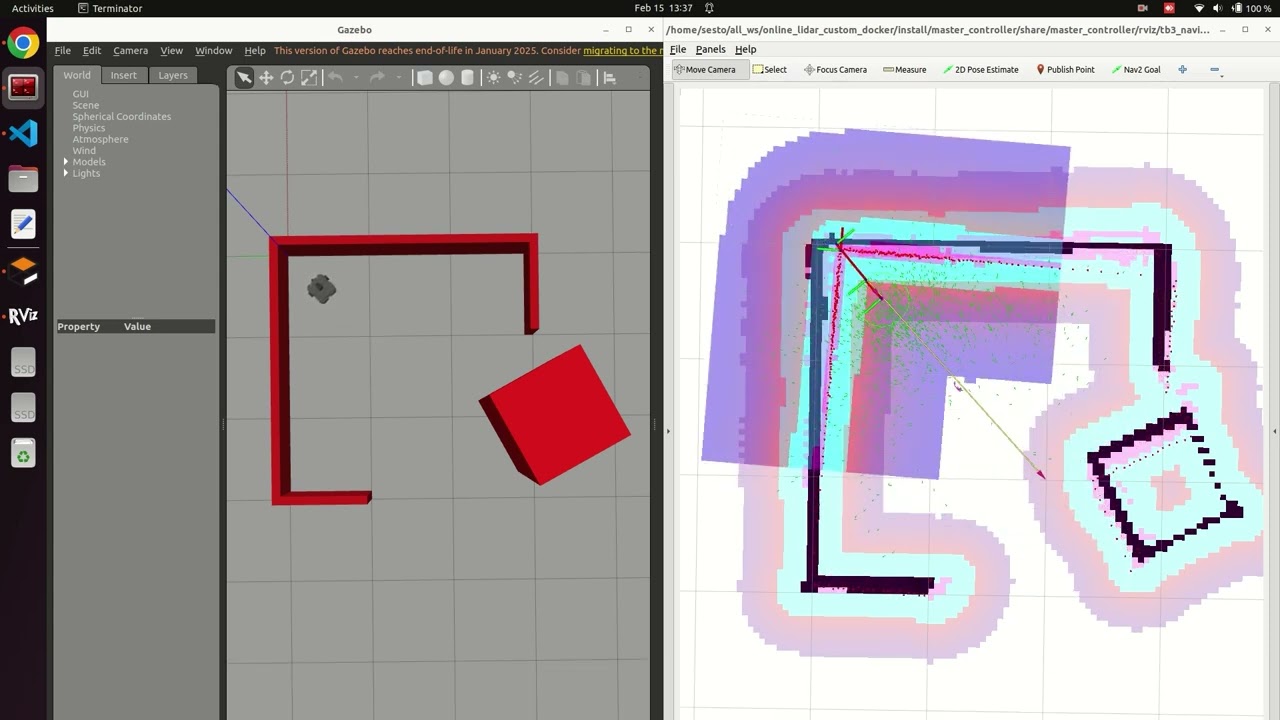
This video demonstrates a simulated mobile robot docking system developed using LiDAR-based feature detection with RANSAC. The docking controller performs geometry-based pose estimation and closed-loop alignment in simulation, and is tested under harsh disturbance conditions including injected pose noise and localization perturbations. The objective was to evaluate robustness against sensor noise and state estimation errors, ensuring reliable docking performance under non-ideal conditions. This project was developed as part of a technical interview assessment for Certis. Key components: 1. LiDAR feature extraction and RANSAC-based corner detection 2. Relative pose estimation in robot frame 3. Closed-loop docking controller with yaw alignment 4. Disturbance testing via pose noise injection Environment: Ubuntu 22.04 + ROS2 Humble Gazebo Classic Link to Github: https://github.com/PiusLim373/robust_...
Comments