KUKA|prc tool path скачать в хорошем качестве
KUKA|prc tool path
4 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: KUKA|prc tool path в качестве 4k
У нас вы можете посмотреть бесплатно KUKA|prc tool path или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон KUKA|prc tool path в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
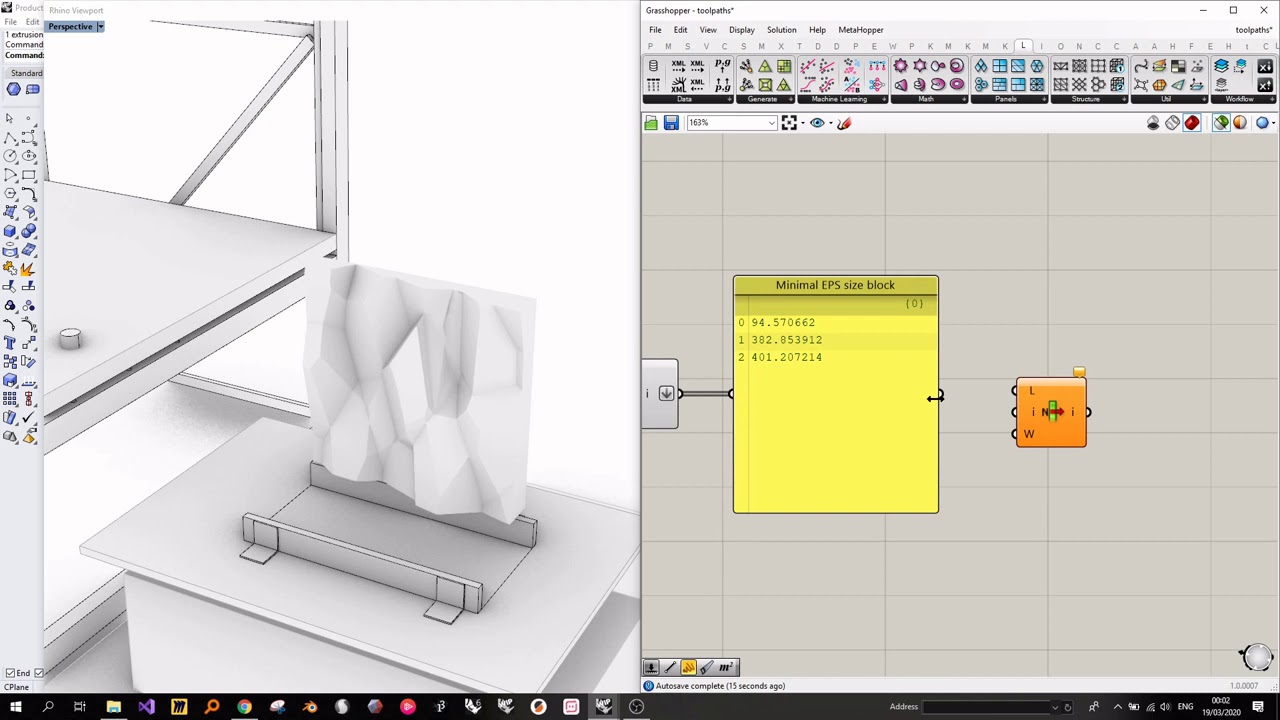
KUKA|prc tool path
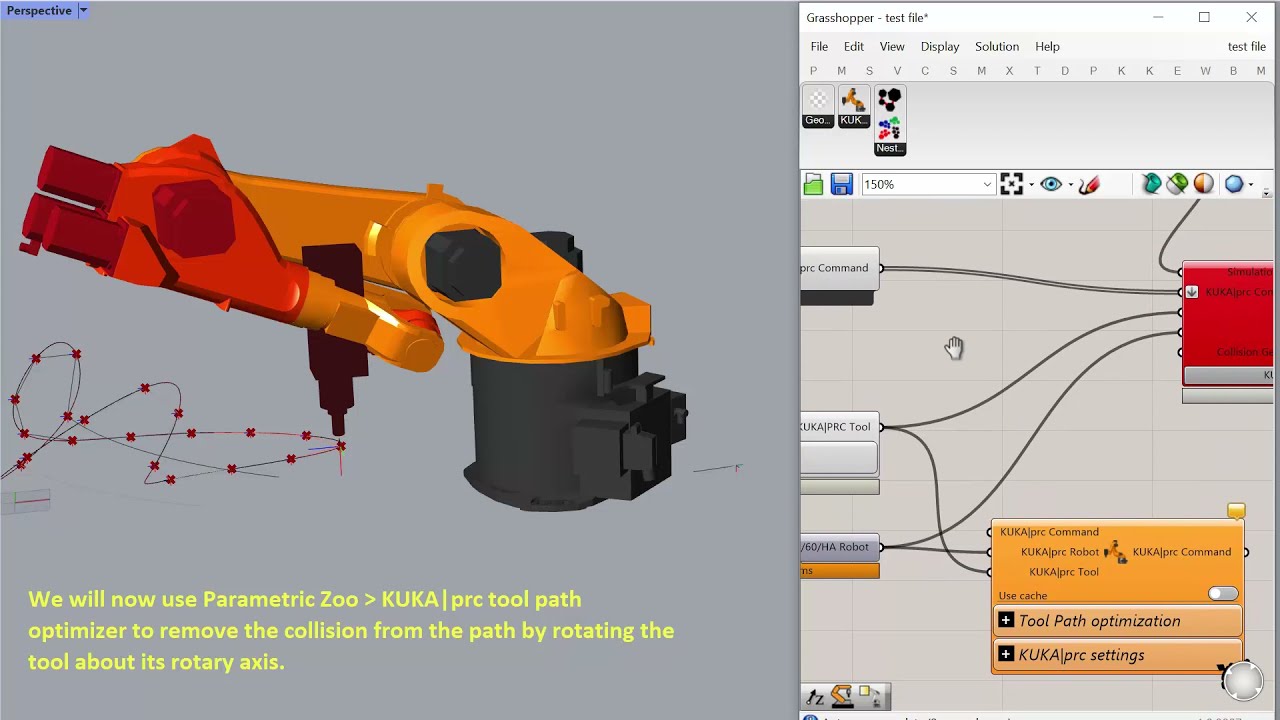
In this video a curve is divided to a series of plane and using those plane a tool path has been created and simulated using the KUKA|prc tools. At the beginning the path contains no collisions, however by modifying the path and pushing some part of it closer to the robot we can see that different parts of robot collide. We will now use Parametric Zoo / KUKA|prc tool path optimizer to remove the collision from the path by rotating the tool about its rotary axis.
Comments