eFMI® Tutorial 2025 - Part 2: Running use-case introduction скачать в хорошем качестве
eFMI® Tutorial 2025 - Part 2: Running use-case introduction
3 месяца назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: eFMI® Tutorial 2025 - Part 2: Running use-case introduction в качестве 4k
У нас вы можете посмотреть бесплатно eFMI® Tutorial 2025 - Part 2: Running use-case introduction или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон eFMI® Tutorial 2025 - Part 2: Running use-case introduction в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
eFMI® Tutorial 2025 - Part 2: Running use-case introduction
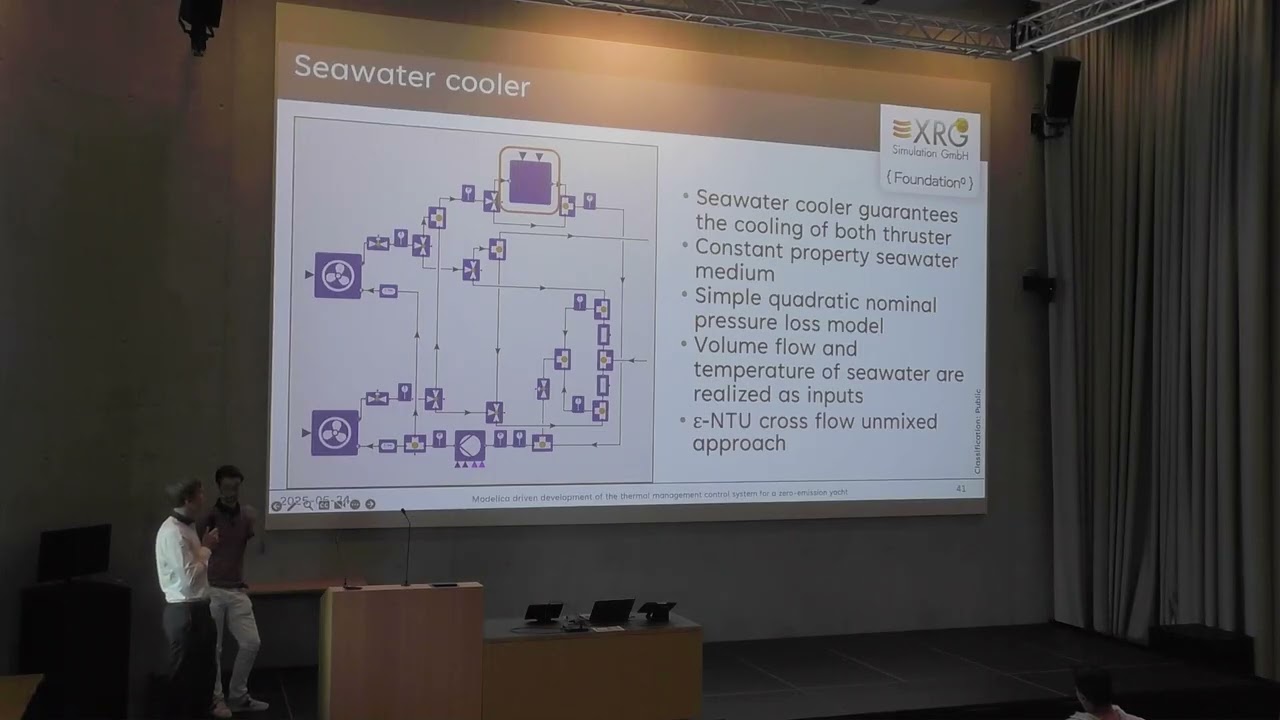
Second part of the eFMI® tutorial presented at the 16th International Modelica Conference, 8th of September 2025, Lucerne, Switzerland (https://modelica.org/events/modelica2.... The tutorial demonstrates the current state-of-the-art of available eFMI tooling in 5 individual parts, including an eFMI overview, motivating example, hands-on, advanced examples and industry use-case: Part 1 – eFMI® motivation and overview ( • eFMI® Tutorial 2025 - Part 1: eFMI® motiva... ): High-level overview of the eFMI Standard and workflow from acausal physics models in Modelica® down to embedded target code. Part 2 – Running use-case introduction ( • eFMI® Tutorial 2025 - Part 2: Running use-... ): Comprehensible Modelica® example demonstrating the advantages and beauty of eFMI. The use-case is an electric vehicle drivetrain torque controller to reduce drivetrain vibrations, using a simple inverse model of the elastic drivetrain (virtual sensor) to feed – and thereby improve the behavior of – a off-the-shelf PI controller from the Modelica Standard Library. Part 3 – Hands-on in Dymola and Software Production Engineering ( • eFMI® Tutorial 2025 - Part 3: Hands-on in ... ): Hands-on experience in Dymola (Dassault Systèmes) and Software Production Engineering (Dassault Systèmes) to generate an eFMU for the example of Part 2. Besides final software-in-the-loop (SiL) and recalibration tests, the generated eFMU and its various intermediate model representations are investigated, focusing on the non-functional quality criteria satisfied by the generated solution, like traceability between eFMU containers, MISRA C:2023 compliance of generated production code and other code quality criteria like static memory allocation and error handling. Also, tooling to import eFMI production code in Simulink® (The MathWorks, Inc.) as C Function blocks or to export production code as Arduino® sketch is presented. Part 4 – Advanced demonstrators ( • eFMI® Tutorial 2025 - Part 4: Advanced dem... ): Two advanced examples demonstrating how eFMI can help with the development of advanced hard real-time model-predictive control in safety-critical embedded environments. The first example is a battery management system (BMS) where the battery cell model is used as virtual sensor to predict the cell core tempurate, such that power requests can be limited to avoid battery damage due to overheating. The second example is a quarter car vehicle model (QVM), that is a hybrid physics and neural networks (NN) model – a so called physics-enhanced neural ordinary differential equations system (PeN-ODE) – with the unknown non-linear physics of the suspension incorporated by NN surrogate models that are well integrated with known physics of the QVM. Part 5 – Industry case-study ( • eFMI® Tutorial 2025 - Part 5 (industry cas... ): Industry use-case for the eFMI based development of a thermal management system (TMS) for a fuel cell electric vehicle (FCEV). For more information about eFMI, visit our website: https://www.efmi-standard.org/
Comments














![Как происходит модернизация остаточных соединений [mHC]](https://imager.clipsaver.ru/jYn_1PpRzxI/max.jpg)


![Детектирование виртуальных машин: как оно работает и как его обходят [RU]](https://imager.clipsaver.ru/W-KGmGH_IZ4/max.jpg)