Novel Extending and Bending Robotic Limb EEMMMa - ASME JMR 2022 2-Minute Overview скачать в хорошем качестве
Novel Extending and Bending Robotic Limb EEMMMa - ASME JMR 2022 2-Minute Overview
3 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Novel Extending and Bending Robotic Limb EEMMMa - ASME JMR 2022 2-Minute Overview в качестве 4k
У нас вы можете посмотреть бесплатно Novel Extending and Bending Robotic Limb EEMMMa - ASME JMR 2022 2-Minute Overview или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Novel Extending and Bending Robotic Limb EEMMMa - ASME JMR 2022 2-Minute Overview в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Novel Extending and Bending Robotic Limb EEMMMa - ASME JMR 2022 2-Minute Overview
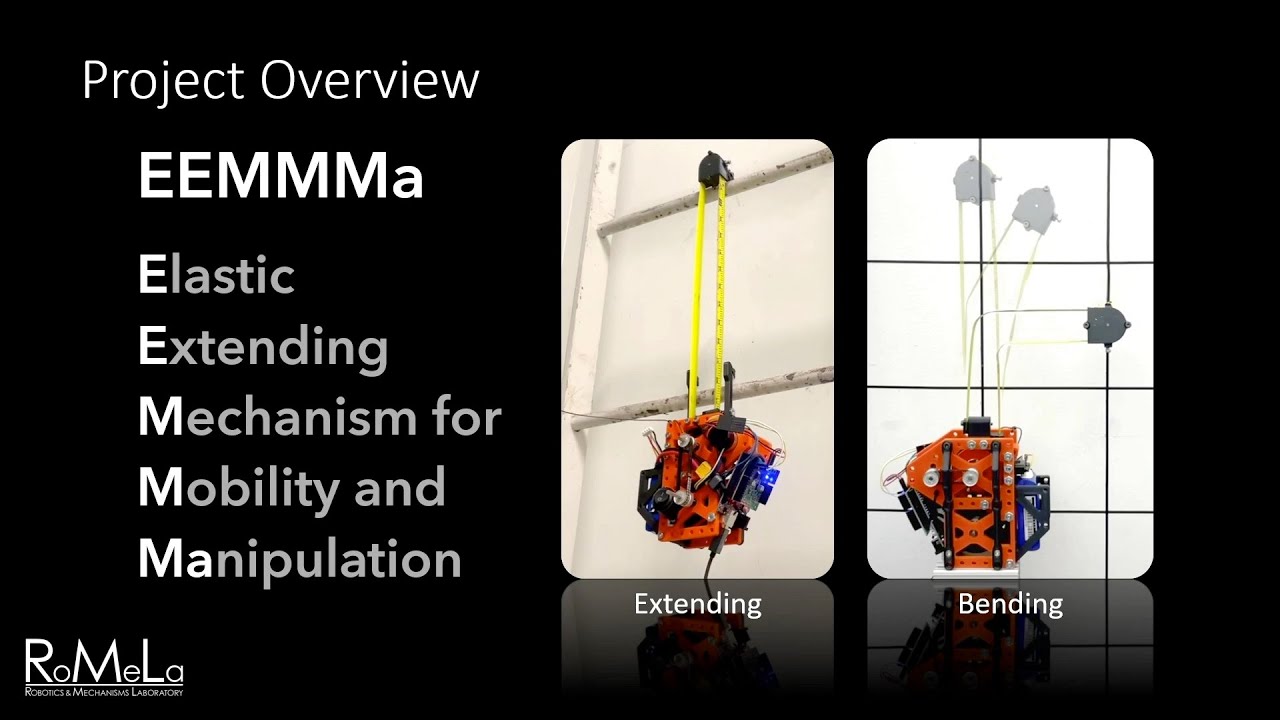
Title: Novel Extending and Bending Robotic Limb EEMMMa - ASME JMR 2022 2-Minute Overview Description: Here's a quick look at RoMeLa's novel robotic limb EEMMMa (Elastic Extending Mechanism for Mobility and Manipulation), a long-reach steel tentacle that can both extend and bend. It can be used to deploy grappling hooks for climbing, and morph its shape to bend around obstacles. This can allow it to place cameras and retrieve samples from hard-to-reach places. The limb's unique tape spring construction results in a versatile, lightweight, and compact system. This can enable future mobile robots to move easily and safely through highly unstructured terrain such as forests or cave systems. Journal paper accepted to ASME-JMR (American Society of Mechanical Engineers, Journal of Mechanisms and Robotics). Paper Title: "Extending and Bending Robotic Limbs Using Tape Springs for Mobility and Manipulation: Preliminary Investigations" JMR-22-1267 Abstract: Conventional mobile robots have difficulty navigating highly unstructured spaces such as caves and forests. In these environments, a highly extendable limb could be useful for deploying hooks to climb over terrain, or for reaching hard-to-access sites for sample collection. This paper details a new form of multimodal mobile robot that utilizes a novel tape spring limb named EEMMMa (Elastic Extending Mechanism for Mobility and Manipulation). Its innovative U-shaped tape structure allows it to handle loads in tension as well as compression. It can also bend using mechanical multiplexing for a lightweight and compact design that is well-suited for mobile robots. For mobility, the limb can extend prismatically to deploy grappling hook anchors to suspend and transport the main body, or even serve as legs. For manipulation, the limb can morph its shape to bend around or over obstacles, allowing it to retrieve distant objects or position cameras around corners. The EEMMMa-1 prototype detailed in this paper successfully demonstrates climbing ladders and shelves in 1.5 bodylengths per second, and can bend up to 100deg. A simplified model of the bending kinematics is developed and analyzed. The paper concludes by detailing future EEMMMa applications and theories to strengthen the model in future studies. Keywords: Tape Springs, Mobile Robots, Compliant Mechanisms, Shell Mechanisms, Robot Design, Multimodal, Rough Terrain, Climbing Robots, Soft Robots, Robotics, Mechanisms, Exploration Contact: Justin Quan (justinquan@ucla.edu)
Comments