J008: Fault estimation of satellite RW using covariance based adaptive unscented Kalman filter скачать в хорошем качестве
J008: Fault estimation of satellite RW using covariance based adaptive unscented Kalman filter
2 недели назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: J008: Fault estimation of satellite RW using covariance based adaptive unscented Kalman filter в качестве 4k
У нас вы можете посмотреть бесплатно J008: Fault estimation of satellite RW using covariance based adaptive unscented Kalman filter или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон J008: Fault estimation of satellite RW using covariance based adaptive unscented Kalman filter в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
J008: Fault estimation of satellite RW using covariance based adaptive unscented Kalman filter
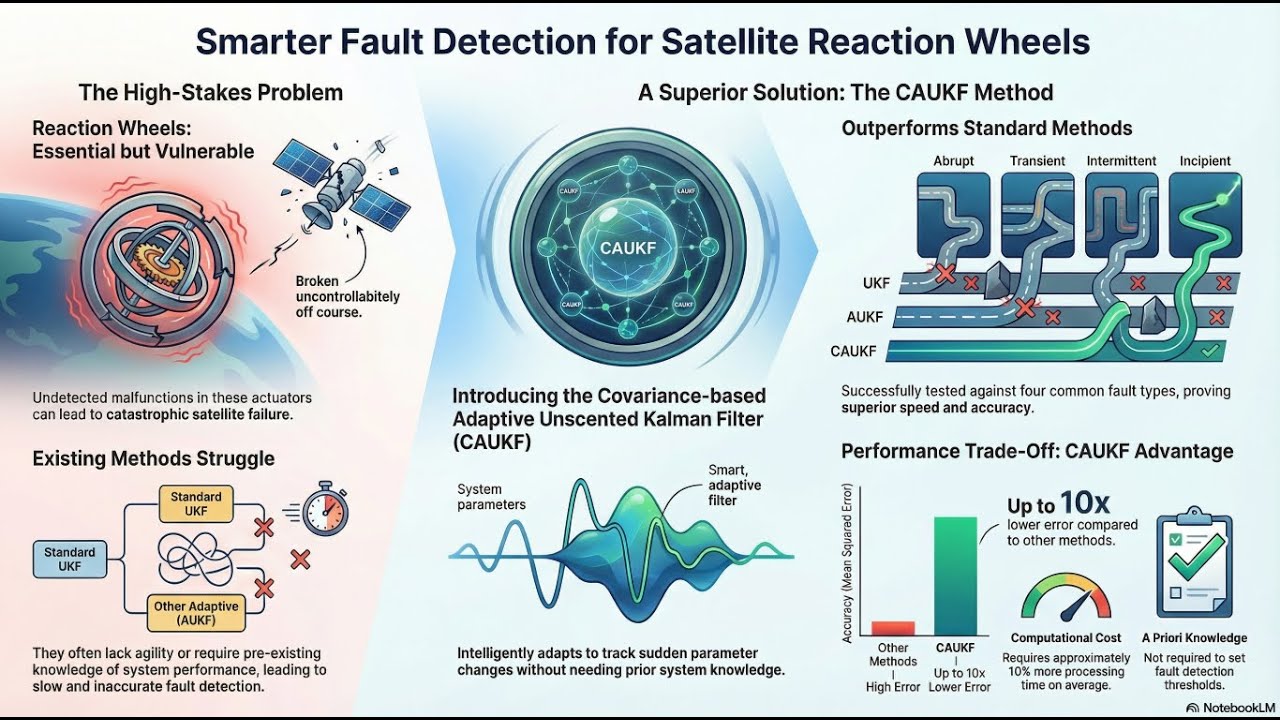
Rahimi A., Kumar K., Alighanbari H. (2017, May) Fault Estimation of Satellite Reaction Wheels Using Covariance Based Adaptive Unscented Kalman Filter, Acta Astronautica, from Elsevier BV, Volume 134, Issue N/A, pp. 159-169, doi: 10.1016/j.actaastro.2017.02.003 This research paper introduces the Covariance Matching Adaptive Unscented Kalman Filter (CAUKF), a novel algorithm designed to monitor the health of satellite reaction wheels. These wheels are critical components for attitude control, yet they are susceptible to hardware malfunctions that can jeopardize entire missions. The authors propose a method that automatically adjusts state covariance matrices to rapidly identify non-measurable system failures without requiring prior knowledge of performance data. By utilizing an adaptive fault annunciation metric, the filter can effectively track abrupt, transient, intermittent, and incipient faults that standard filters often miss. Extensive simulations demonstrate that this approach significantly reduces estimation errors and improves tracking speed compared to traditional models. Ultimately, the study provides a robust framework for developing fail-safe satellites where physical hardware redundancy is limited by space and power constraints.
Comments








![Фильтр Калмана [Control Bootcamp]](https://image.4k-video.ru/id-video/s_9InuQAx-g)

![Как сжимаются изображения? [46 МБ ↘↘ 4,07 МБ] JPEG в деталях](https://image.4k-video.ru/id-video/Kv1Hiv3ox8I)








