Probably The Most Versatile Quadruped Robot: HyQ скачать в хорошем качестве
Probably The Most Versatile Quadruped Robot: HyQ
11 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Probably The Most Versatile Quadruped Robot: HyQ в качестве 4k
У нас вы можете посмотреть бесплатно Probably The Most Versatile Quadruped Robot: HyQ или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Probably The Most Versatile Quadruped Robot: HyQ в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Probably The Most Versatile Quadruped Robot: HyQ
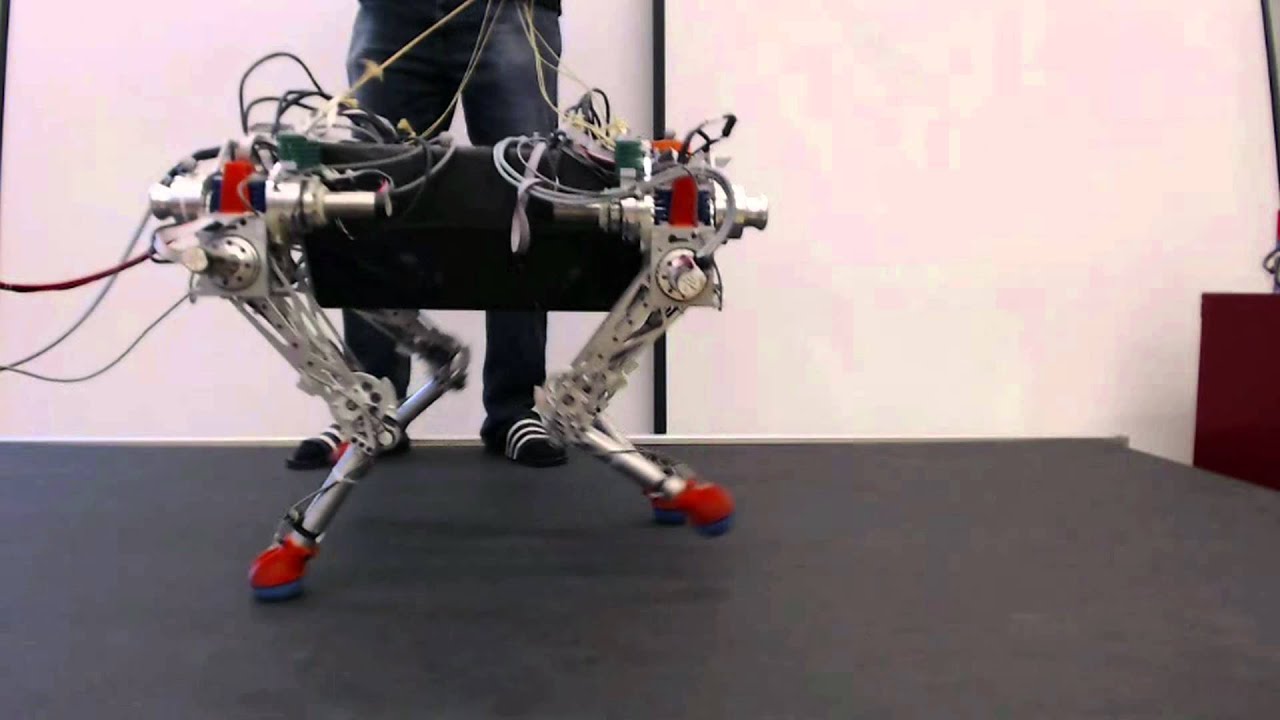
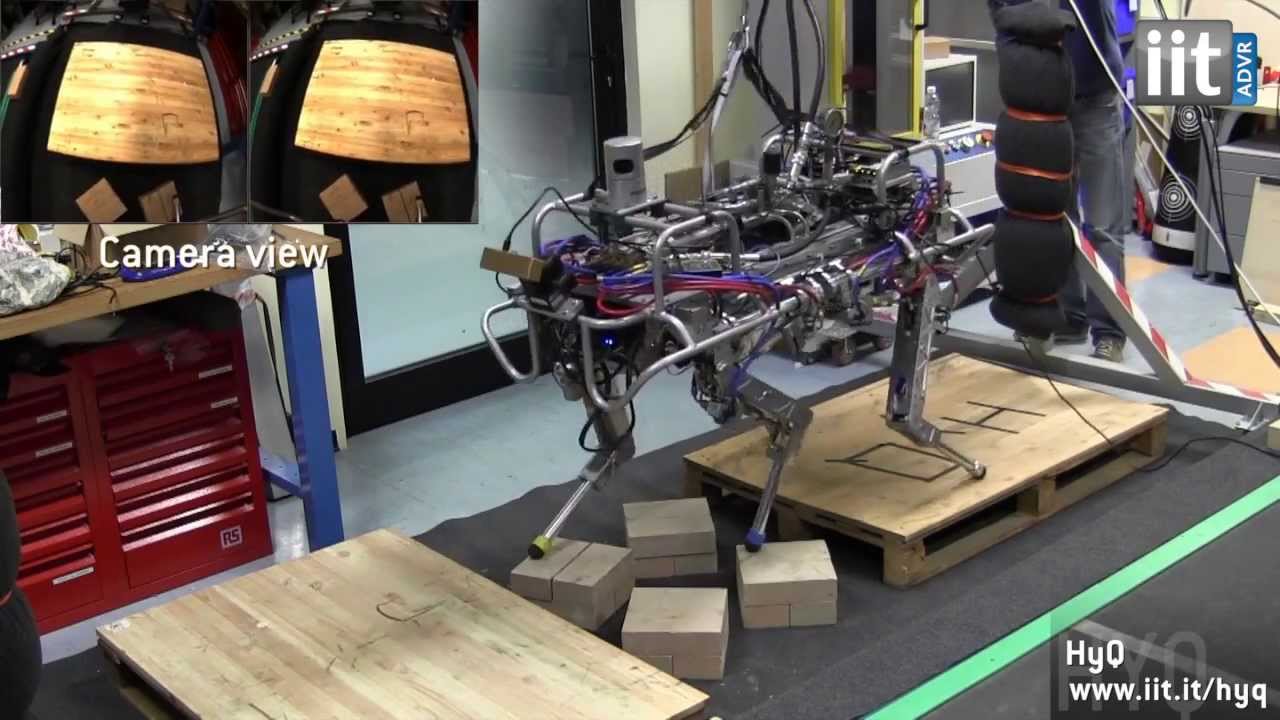
The versatile quadruped robot HyQ demonstrates its motion skills that range from planned motion over uneven terrain to highly dynamic motions. Some of the highlights are: chimney climbing, lateral disturbances by 23kg boxing bag, planned motion over stepping stones and pallets, and a flying trot. All experiments are executed on the same machine. There are no physical springs in the legs or body of HyQ, all compliance results from active adjustment of stiffness and damping (by software). The high-performance joint torque control is a key element to achieve such a wide range of stable motions. For more information: http://www.iit.it/hyq The following publications provide the details of the used controllers, planners, hardware, etc. 0:17 - 0:49 A. Winkler, I. Havoutis, S. Bazeille, J. Ortiz, M. Focchi, R. Dillmann, D. G. Caldwell, C. Semini, "Path Planning with Force-Based Foothold Adaptation and Virtual Model Control for Torque Controlled Quadruped Robots," IEEE International Conference on Robotics and Automation (ICRA), 2014. 0:50 - 1:32 and 1:47 - 1:54 and V. Barasuol, J. Buchli, C. Semini, M. Frigerio, E. R. De Pieri, D. G. Caldwell, "A Reactive Controller Framework for Quadrupedal Locomotion on Challenging Terrain", IEEE International Conference on Robotics and Automation (ICRA), 2013. 1:33 - 1:46 C. Semini, V. Barasuol, T. Boaventura, M. Frigerio, J. Buchli, "Is Active Impedance the Key to a Breakthrough for Legged Robots?" International Symposium of Robotics Research (ISRR), 2013. 1:55 - 2:13 M. Focchi, V. Barasuol, I. Havoutis, J. Buchli, C. Semini, D. G. Caldwell, "Local Reflex Generation for Obstacle Negotiation in Quadrupedal Locomotion", Int. Conf. on Climbing and Walking Robots (CLAWAR), 2013. 2:13 - 2:17 C. Semini, H. Khan, M. Frigerio, T. Boaventura, M. Focchi, J. Buchli and D. G. Caldwell, "Design and Scaling of Versatile Quadruped Robots", Int. Conf. on Climbing and Walking Robots (CLAWAR), 2012. 2:18 - 2:46 T. Boaventura, C. Semini, J. Buchli, M. Frigerio, M. Focchi, D. G. Caldwell, "Dynamic Torque Control of a Hydraulic Quadruped Robot", IEEE International Conference on Robotics and Automation (ICRA), 2012. 2:47 - 2:58 T. Boaventura, G.A. Medrano-Cerda, C. Semini, J. Buchli, D. G. Caldwell, "Stability and Performance of the Compliance Controller of the Quadruped Robot HyQ," IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2013. 2:59 - 3:19 M. Focchi, et al. 2014 (under review) Perception system: S. Bazeille, et al. 2014 (under review) Software: efficienct code generation for the simulation and real-time control of robots with arms and legs: M. Frigerio, J. Buchli and D. G. Caldwell, "Code Generation of Algebraic Quantities for Robot Controllers", IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2012. Hardware details: C. Semini, "HyQ -- Design and Development of a Hydraulically Actuated Quadruped Robot," Dissertation, Istituto Italiano di Tecnologia and University of Genoa, Italy, 2010. and C. Semini, N. G. Tsagarakis, E. Guglielmino, M. Focchi, F. Cannella, and D. G. Caldwell, "Design of HyQ - a hydraulically and electrically actuated quadruped robot," Journal of Systems and Control Engineering, vol. 225, no. 6, pp. 831--849, 2011. Video editing by M. Focchi, A. Abrusci and C. Semini.
Comments






![Fast Object Visual Servoing and Grasping on Quadruped Manipulator [IROS 2023]](https://imager.clipsaver.ru/ztMl52v3ncY/max.jpg)