2 Complete simulation of a mobile robot with MATLAB: Background / Simulation скачать в хорошем качестве
2 Complete simulation of a mobile robot with MATLAB: Background / Simulation
8 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: 2 Complete simulation of a mobile robot with MATLAB: Background / Simulation в качестве 4k
У нас вы можете посмотреть бесплатно 2 Complete simulation of a mobile robot with MATLAB: Background / Simulation или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон 2 Complete simulation of a mobile robot with MATLAB: Background / Simulation в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
2 Complete simulation of a mobile robot with MATLAB: Background / Simulation
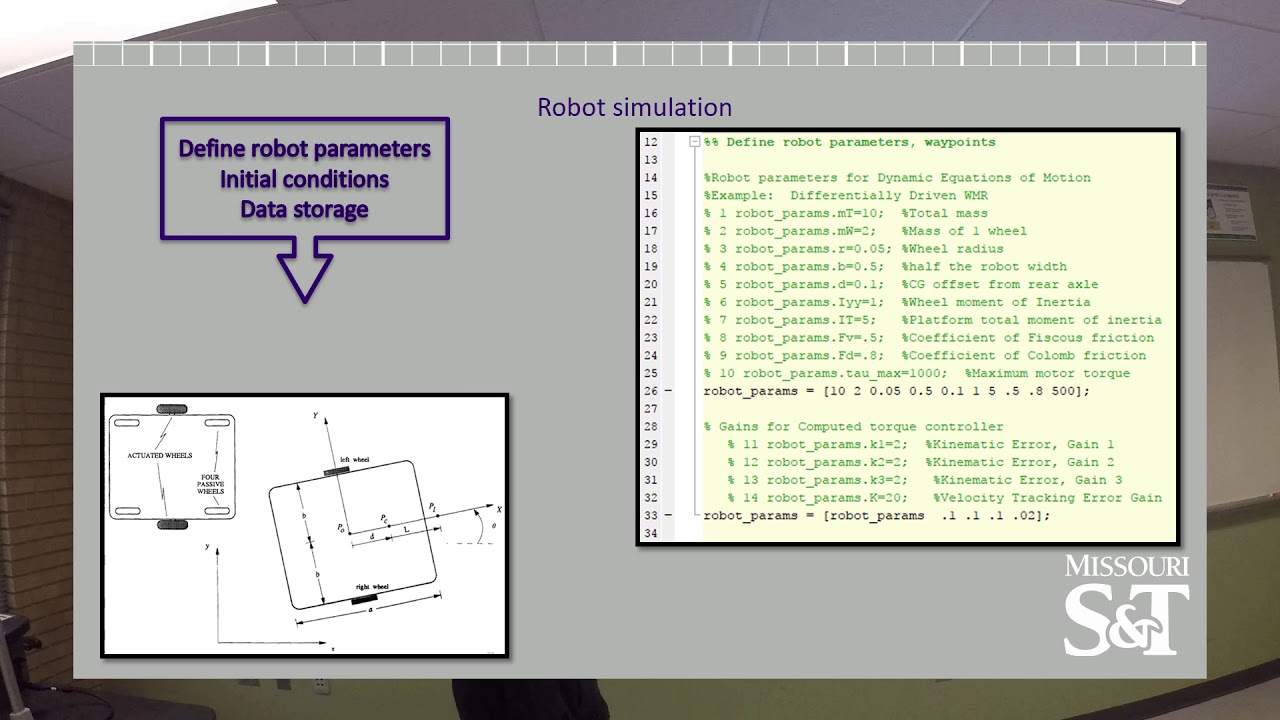
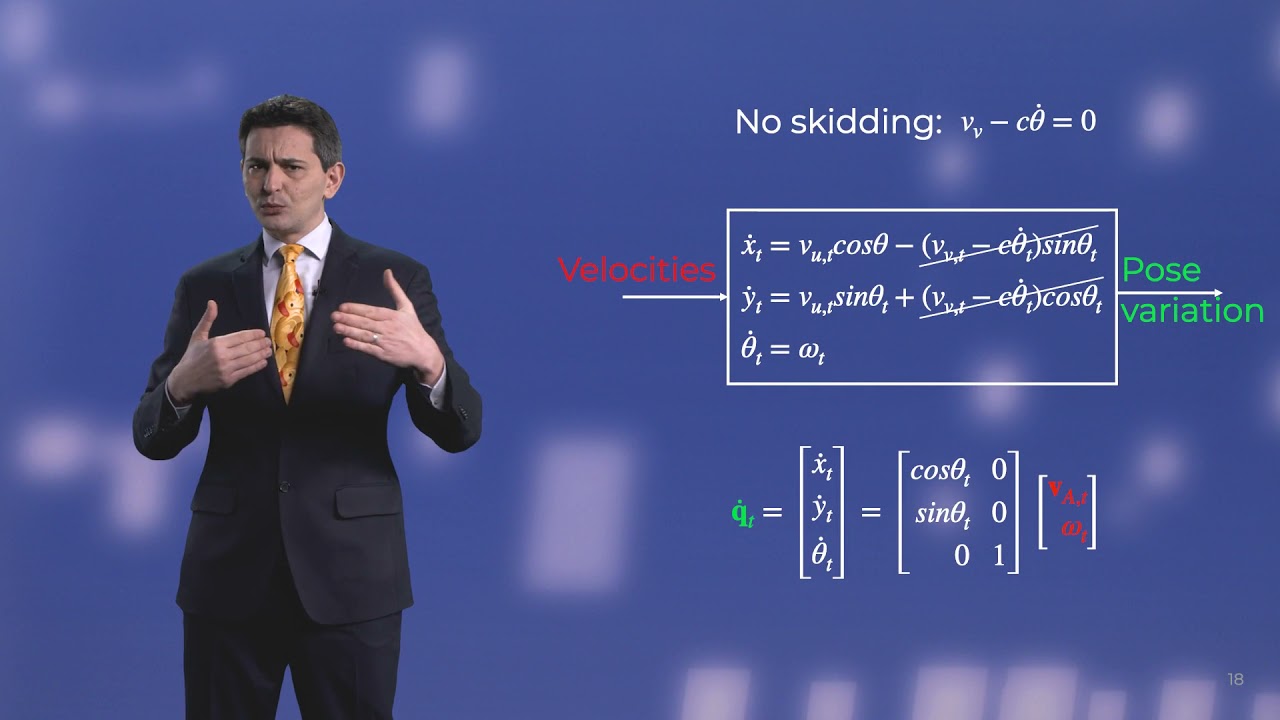
George Holmes, PhD student in Mechanical Engineering, presents a simulation of a differential drive robot in MATLAB using a discrete time implementation. Includes both kinematic and dynamic controllers, simulation of the dynamics, and an update of the kinematic pose. engineeredterrain.com www.linkedin.com/in/george-holmes-b4a87b27 IG: @georgos_technology The first part of the three part series provides motivation for a series of videos simulating of a differential drive robot entirely in MATLAB using a discrete time implementation as opposed to the classic ODE solver. The second part of the video series provides relevant background in robotics to understand the simulation; including kinematics, dynamics, reference / actual robots, position errors, and command velocity. Additionally, a complete walk through of the simulation code is provided. The third and final part discusses the plots generated from the simulation using a two layer NN controller.
Comments


![Почему работает теория шести рукопожатий? [Veritasium]](https://imager.clipsaver.ru/ggI1xKzoANs/max.jpg)






![Пожалуй, главное заблуждение об электричестве [Veritasium]](https://imager.clipsaver.ru/6Hv2GLtnf2c/max.jpg)






![Как сжимаются изображения? [46 МБ ↘↘ 4,07 МБ] JPEG в деталях](https://imager.clipsaver.ru/Kv1Hiv3ox8I/max.jpg)