Hierarchical Multiobjective Shortest Path Problems скачать в хорошем качестве
Hierarchical Multiobjective Shortest Path Problems
4 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Hierarchical Multiobjective Shortest Path Problems в качестве 4k
У нас вы можете посмотреть бесплатно Hierarchical Multiobjective Shortest Path Problems или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Hierarchical Multiobjective Shortest Path Problems в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Hierarchical Multiobjective Shortest Path Problems
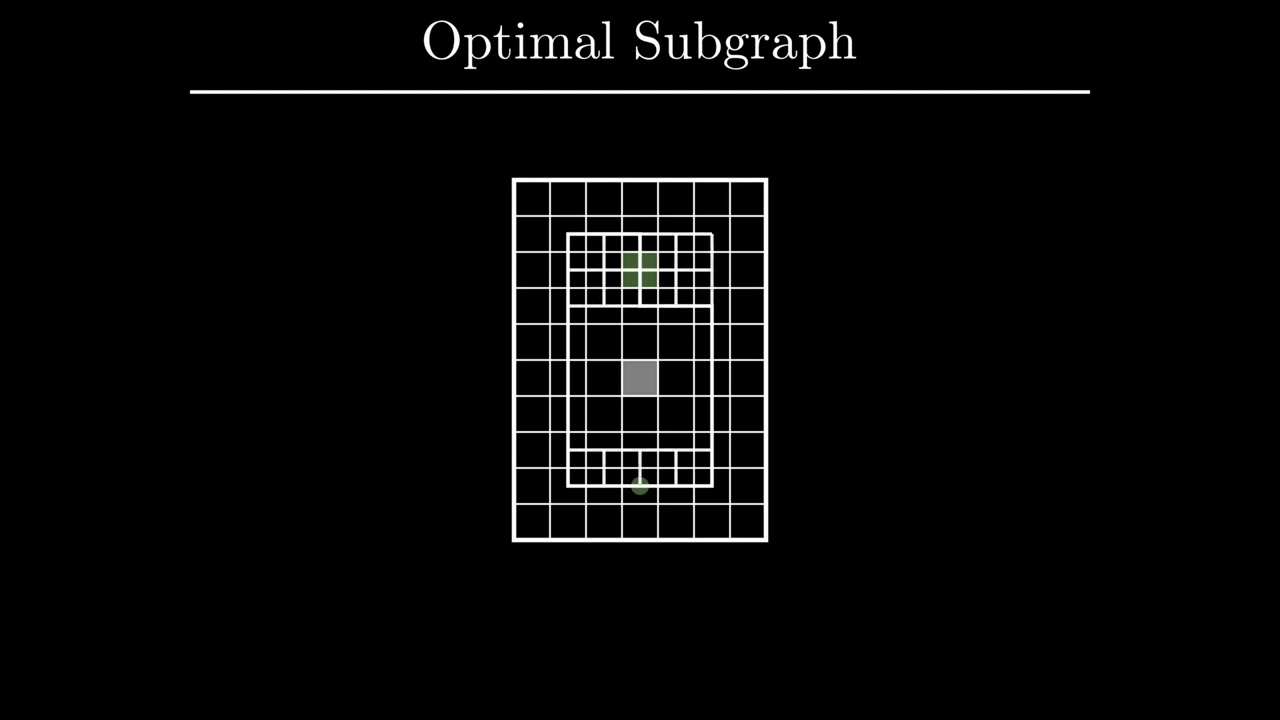
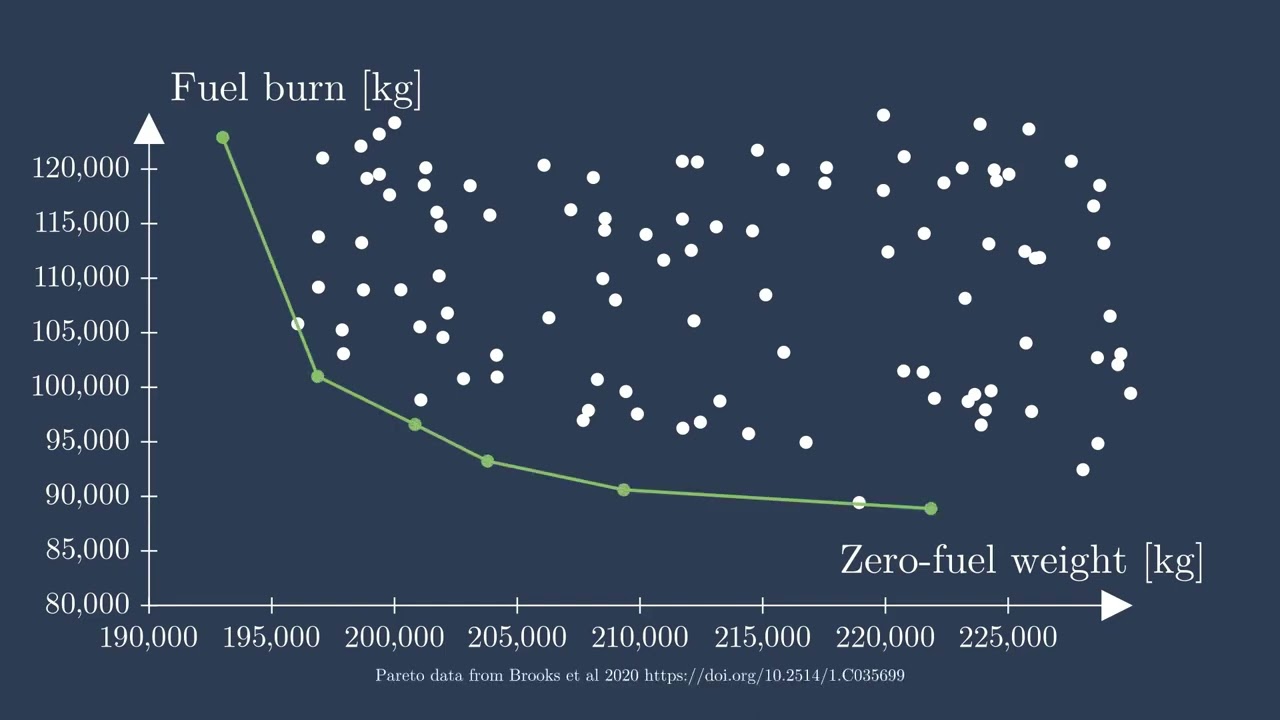
Hierarchical Multiobjective Shortest Path Problems Konstantin Slutsky (Iowa State University, IA, USA) Dmitry Yershov (Motional Inc) Tichakorn Wongpiromsarn (Iowa State University, IA, USA) Emilio Frazzoli (Motional Inc) We consider the shortest path problem on graphs with weights taking values in Cartesian products of cost monoids. Such cost structures appear in multiobjective planning including, for instance, the minimum-violation planning framework. It is known that these products often do not satisfy the conditions of a cost monoid. Classical dynamic programming graph search algorithms may therefore fail to find an optimal solution. We isolate the concept of a regular cost monoid and propose an iterative search algorithm that finds an optimal path in graphs weighted by products of such costs. Our algorithm allows this class of multiobjective planning problems to be solved in polynomial time. Keywords: Noneuclidean Shortest Path Problem, Multiobjective Path Planning, Minimum Violation Motion Planning, Autonomous Vehicle Navigation in Urban Environments, Traffic Rule Constraints
Comments



![Почему реактивный двигатель не плавится? [Veritasium]](https://imager.clipsaver.ru/F6UB0V2Fct4/max.jpg)












![[7.5] Dijkstra Shortest Path Algorithm in Python](https://imager.clipsaver.ru/OrJ004Wid4o/max.jpg)