Controlling 4WD Arduino Robot via Color Tracking скачать в хорошем качестве
Controlling 4WD Arduino Robot via Color Tracking
8 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Controlling 4WD Arduino Robot via Color Tracking в качестве 4k
У нас вы можете посмотреть бесплатно Controlling 4WD Arduino Robot via Color Tracking или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Controlling 4WD Arduino Robot via Color Tracking в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
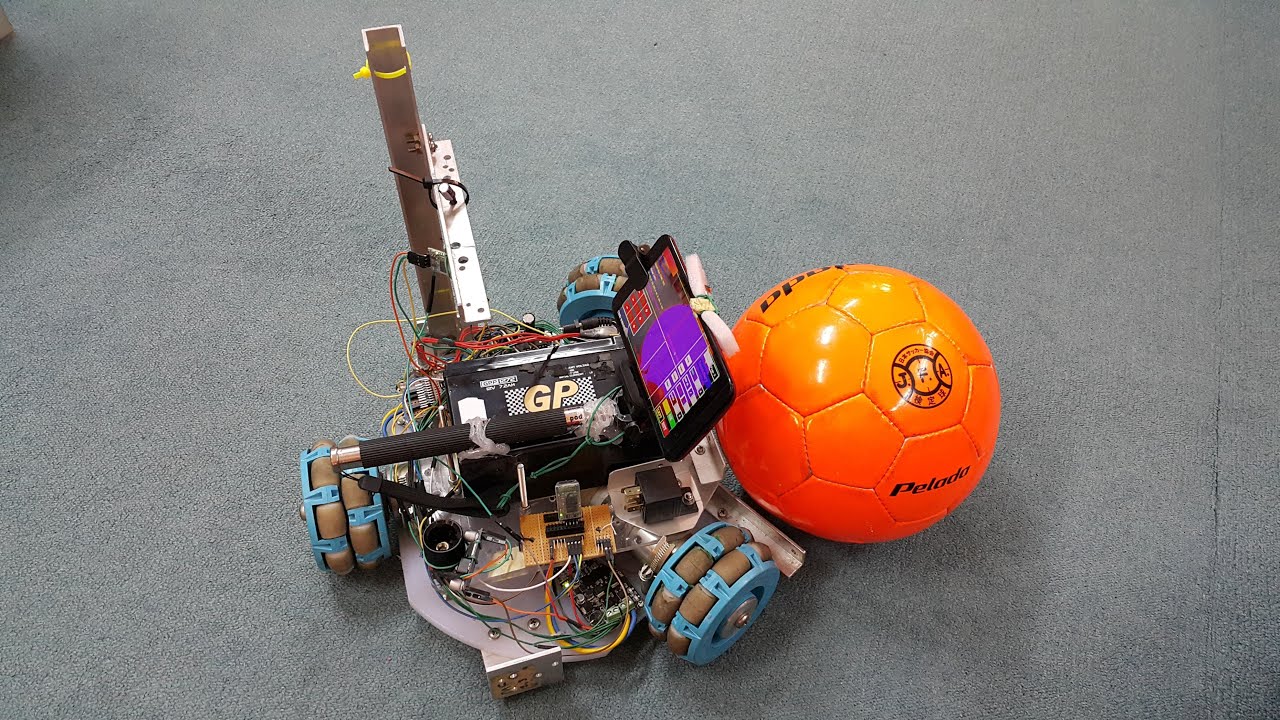
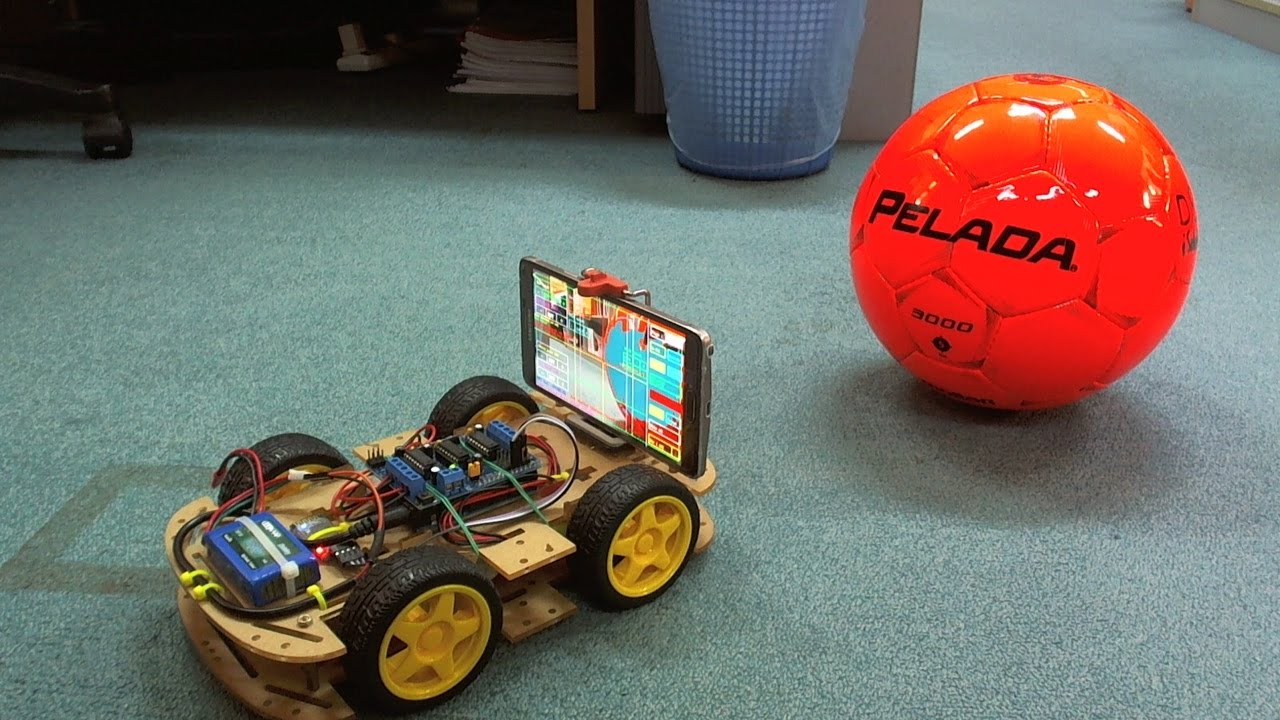
Controlling 4WD Arduino Robot via Color Tracking
Get the Color Tracking App (Ver 4.6) here: https://goo.gl/VH2r8G. (Updated on 26 June 2018): Download the OpenCV Manager that suits your phone here: https://goo.gl/8hWrhL (Version 2.4) or here https://goo.gl/Ph7po4 (Version 3.1). Try the Version 2.4 first. For example for my Huawei P20 Lite that uses Android Oreo 8.0.0, the version that fits the phone is OpenCV_2.4.11_Manager_2.20_armv7a-neon-android8.apk. (Updated on 13 November 2019): My Oppo F9 Pro (Android Oreo 8.1.0) uses OpenCV_3.1.0_Manager_3.10_armeabi.apk to run the app. Be sure not to use full screen mode (offered by Android OS) when running the app. To use the omitted Obstacle Avoidance function you may use this Ver 2.1 here: https://goo.gl/tfi6kr. Get the Arduino code here: https://goo.gl/wh2q6K and the schematic here (L293D): https://goo.gl/57rckQ. Get the schematic here: https://goo.gl/57rckQ (same schematic for building Arduino robot from this video: • Building and Controlling 4WD Arduino Robot... ). You may find additional pictures of the robot and app's screenshots here: https://goo.gl/3gOGXa. (Updated on 8 January 2018): For those who are using L298N motor driver, you can find the code here: https://goo.gl/uHsCJu and the diagram here: https://goo.gl/m7E8RR. Assembling tutorial follow this video: • L298N: Building and Controlling 4WD Arduin... . Short demonstration video: https://goo.gl/CBtQos. (Updated on 30 November 2018): The detection setting procedures are summarized into these steps (if you want the app to control your robot car, make sure you connect the app to the Bluetooth first as if not, all the following steps will be reset and you will need to start over again): 1. On Page 1, click on BALL button. Then click on / symbol next to the BALL button. 2. Point the camera to the object colour you want to detect, then tap on that object's image. The app will highlight the object detected. 3. If you are satisfied with the detection coverage, click OK button. If not, adjust the detection quality by playing around 3 values in the red boxes located at the bottom left of the screen (the red boxes only appear after you click BALL button, and will be hidden when you click OK button). The green numbers inside the red boxes denote the values for HSV's range. You can also adjust the HSV values themselves by pressing the Range button (located next to the yellow box beside the OK button), and when it turns to yellow, the HSV values will be shown. Normally, we don't really need to adjust the Range and HSV values as the app will automatically set the best values every time we tap on the object's colour we want to detect. 4. Press Lock AE (lock auto exposure) and Lock WB (lock white balance) to make sure those parameters are reserved even when the surrounding lighting changes. 5. The label Comb. on the Comb. button will make the app combine all the same colours into one COG (center of gravity). If you want the app detect the largest blob, press on it until it display Larg. Else if you want the app to detect your desired colour separately, click on it again until it display Sepa. 6. If everything is OK, press OK. If you want to edit the detection parameters again, just press on the BALL button again. 7. Go to Page 2, increase Rot. speed (rotational speed) and Pref. speed (preferred speed) as you wish and click START button to make your robot move. Press STOP button to make it stop. Any question don't hesitate to ask me in the comment section below. Thanks!
Comments