Hierarchical Trajectory Planning of Floating-Base Multi-Link Robot for Maneuvering in Confined Envs скачать в хорошем качестве
Hierarchical Trajectory Planning of Floating-Base Multi-Link Robot for Maneuvering in Confined Envs
3 дня назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Hierarchical Trajectory Planning of Floating-Base Multi-Link Robot for Maneuvering in Confined Envs в качестве 4k
У нас вы можете посмотреть бесплатно Hierarchical Trajectory Planning of Floating-Base Multi-Link Robot for Maneuvering in Confined Envs или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Hierarchical Trajectory Planning of Floating-Base Multi-Link Robot for Maneuvering in Confined Envs в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Hierarchical Trajectory Planning of Floating-Base Multi-Link Robot for Maneuvering in Confined Envs
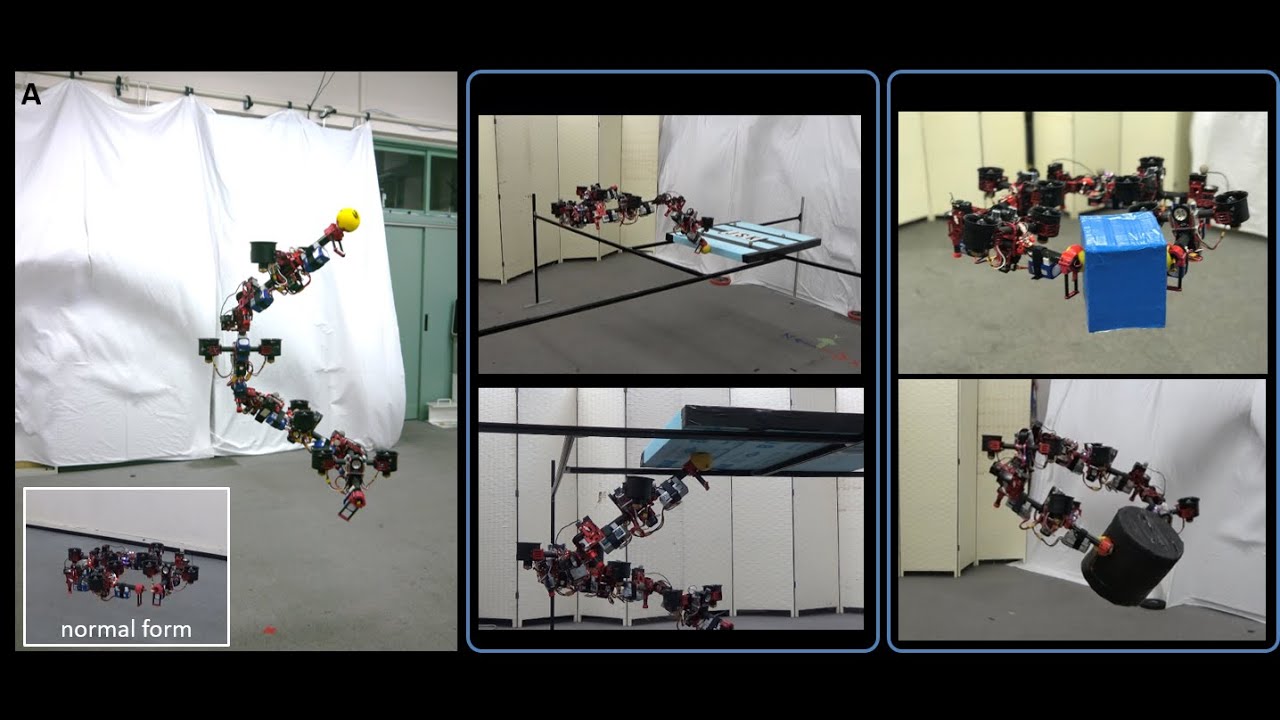
This is our latest work on the trajectory planning method for floating-based articulated robots, enabling the global path searching in complex and cluttered environments. This work has been published in IEEE Transactions on Automation Science and Engineering, and will be also presented in IEEE IROS 2026. =========================================== Title: Hierarchical Trajectory Planning of Floating-Base Multi-Link Robot for Maneuvering in Confined Environments Authors: Chen, Yicheng and Li, Jinjie and Liu, Haokun and Luo, Zicheng and Kaneko, Kotaro and Zhao, Moju Abstraction: Floating-base multi-link robots can change their shape during flight, making them well-suited for applications in confined environments such as autonomous inspection and search and rescue. However, trajectory planning for such systems remains an open challenge because the problem lies in a high-dimensional, constraint-rich space where collision avoidance must be addressed together with kinematic limits and dynamic feasibility. This work introduces a hierarchical trajectory planning framework that integrates global guidance with configuration-aware local optimization. First, we exploit the dual nature of these robots---the root link as a rigid body for guidance and the articulated joints for flexibility---to generate global anchor states that decompose the planning problem into tractable segments. Second, we design a local trajectory planner that optimizes each segment in parallel with differentiable objectives and constraints, systematically enforcing kinematic feasibility and maintaining dynamic feasibility by avoiding control singularities. Third, we implement a complete system that directly processes point-cloud data, eliminating the need for handcrafted obstacle models. Extensive simulations and real-world experiments confirm that this framework enables an articulated aerial robot to exploit its morphology for maneuvering that rigid robots cannot achieve. To the best of our knowledge, this is the first planning framework for floating-base multi-link robots that has been demonstrated on a real robot to generate continuous, collision-free, and dynamically feasible trajectories directly from raw point-cloud inputs, without relying on handcrafted obstacle models. Reference: Hierarchical Trajectory Planning of Floating-Base Multi-Link Robot for Maneuvering in Confined Environments (accepted to IEEE Transactions on Automation Science and Engineering) 👥 Authors: Yicheng Chen, Jinjie Li, Haokun Liu, Zicheng Luo, Kotaro Kaneko, and Moju Zhao 🌐 Paper website: https://yichengchen.com/publication/h... 🔗 Paper PDF: http://arxiv.org/abs/2602.22459
Comments
-
 3 года назад
3 года назад
-
 Трансляция закончилась 13 часов назад
Трансляция закончилась 13 часов назад
-
 Трансляция закончилась 8 часов назад
Трансляция закончилась 8 часов назад
-
 8 месяцев назад
8 месяцев назад
-

-
 1 день назад
1 день назад
-
 1 день назад
1 день назад
-
 10 месяцев назад
10 месяцев назад
-
 5 дней назад
5 дней назад
-
 3 дня назад
3 дня назад
-
 3 года назад
3 года назад
-
 8 часов назад
8 часов назад
-
 11 часов назад
11 часов назад
-
 Трансляция закончилась 9 часов назад
Трансляция закончилась 9 часов назад
-
 1 день назад
1 день назад
-

-
 1 год назад
1 год назад
-
 11 месяцев назад
11 месяцев назад
-
 3 дня назад
3 дня назад
-
 2 дня назад
2 дня назад