Implementing BatchNorm2D in PyTorch скачать в хорошем качестве
Implementing BatchNorm2D in PyTorch
11 месяцев назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Implementing BatchNorm2D in PyTorch в качестве 4k
У нас вы можете посмотреть бесплатно Implementing BatchNorm2D in PyTorch или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Implementing BatchNorm2D in PyTorch в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
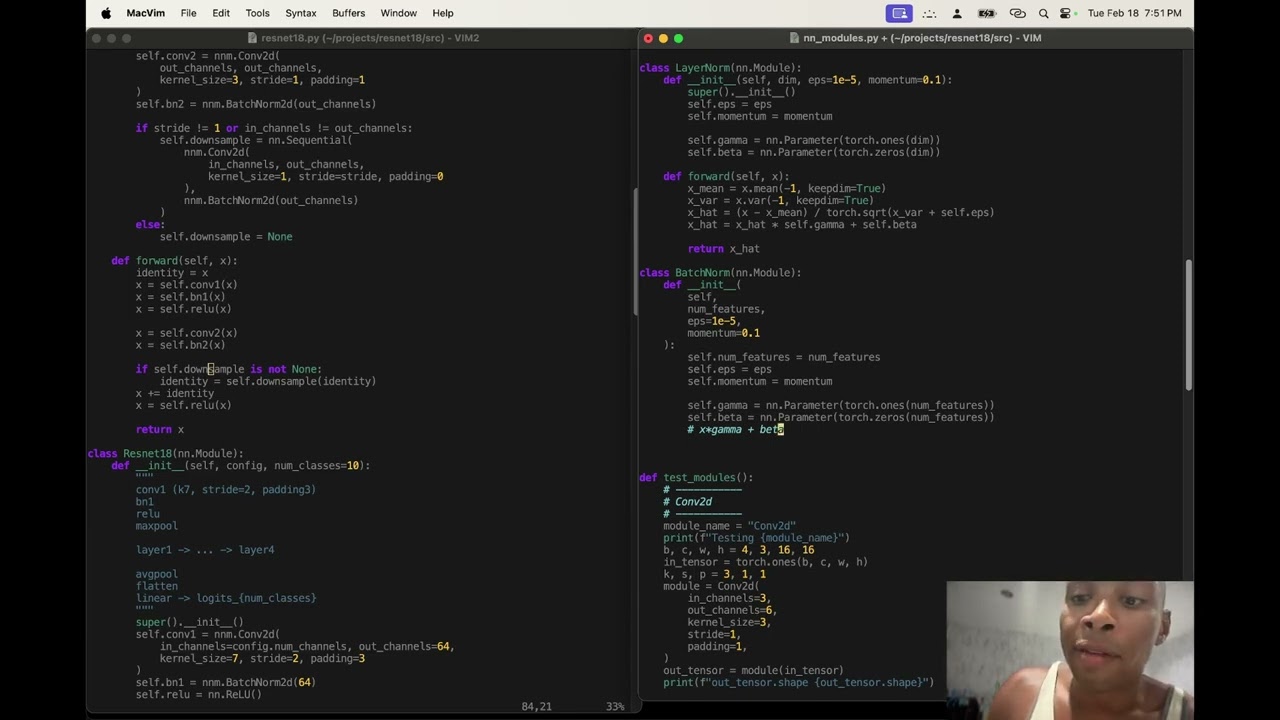
Implementing BatchNorm2D in PyTorch
In this video, we take our ResNet18 implementation one step further by adding Batch Normalization (BatchNorm2D) from scratch using PyTorch. We break down the key concepts behind BatchNorm, including: What Batch Normalization Does: Why normalizing per feature channel helps with training stability. Affine Transformations & Covariate Shift: How learnable scale and shift parameters help maintain smooth gradient flow. Momentum & Running Statistics: How BatchNorm maintains running estimates of mean/variance for stable inference. Step-by-Step PyTorch Implementation: Writing BatchNorm2D from scratch and integrating it into ResNet18. Once implemented, we will train our ResNet18 on MNIST, where we expect to see fast convergence (at least faster than a vision transformer in theory). In a future video, we’ll scale the model on Runpod and compare its performance on CIFAR-10 vs. Vision Transformers. 🔥 What You’ll Learn: ✔️ How Batch Normalization stabilizes deep networks ✔️ Why ResNet benefits from BatchNorm ✔️ Writing BatchNorm2D in PyTorch step by step ✔️ Debugging and verifying implementation 🚀 Next Video: Deploying ResNet18 on Runpod for CIFAR-10 training and comparing its convergence to Vision Transformers! 📌 Resources & Socials: GitHub: https://github.com/jbthejedi/resnet18 X: @jbthejedi / jbthejedi Instagram: / justinbarrythejedi LinkedIn: / justin-barry-e If you enjoy deep dives into AI architectures, like, subscribe, and drop a comment on what you’d like to see next!
Comments