07 - 3D Computer Vision - 🎯 Deformable Non-Rigid Registration | Coherent Point Drift скачать в хорошем качестве
07 - 3D Computer Vision - 🎯 Deformable Non-Rigid Registration | Coherent Point Drift
1 месяц назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: 07 - 3D Computer Vision - 🎯 Deformable Non-Rigid Registration | Coherent Point Drift в качестве 4k
У нас вы можете посмотреть бесплатно 07 - 3D Computer Vision - 🎯 Deformable Non-Rigid Registration | Coherent Point Drift или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон 07 - 3D Computer Vision - 🎯 Deformable Non-Rigid Registration | Coherent Point Drift в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
07 - 3D Computer Vision - 🎯 Deformable Non-Rigid Registration | Coherent Point Drift
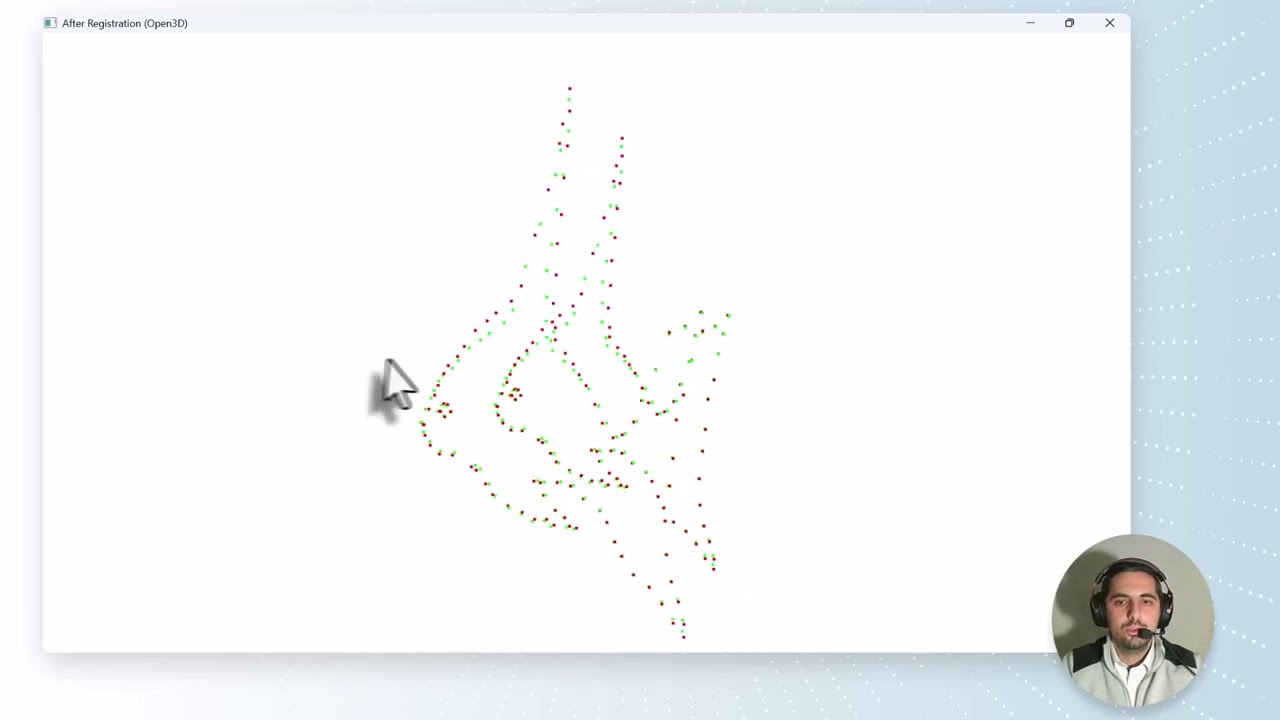
🎯 Coherent Point Drift Algorithm Explained | Deformable Point Cloud Registration Tutorial | Y = Y + GW Master the Coherent Point Drift (CPD) algorithm for deformable 3D point cloud registration! This complete 6-minute step-by-step tutorial shows you exactly how the mathematical equation Y = Y + GW aligns and deforms point clouds using Python. ⏱️ TIMESTAMPS 0:00 - Introduction to CPD Algorithm 0:45 - STEP 0: Loading 2D Fish Dataset 1:30 - STEP 1: Initial Point Cloud Visualization (Before Registration) 2:45 - STEP 2: Understanding Y = Y + GW Equation 3:30 - Running Deformable Registration (Live Iterations) 5:00 - STEP 3: Final Results Comparison (After Registration) 5:45 - Conclusion & Next Steps 🔥 WHAT YOU'LL LEARN ✅ Complete explanation of Coherent Point Drift (CPD) algorithm ✅ How Y = Y + GW transforms source points to match target shape ✅ Gaussian matrix G and weight matrix W in detail ✅ Point cloud visualization with Open3D and Matplotlib ✅ Real-time registration iteration tracking ✅ Practical Python implementation with pycpd library ✅ 2D to 3D point cloud conversion techniques ✅ Before/after registration comparison 📚 TUTORIAL BREAKDOWN STEP 0 - Data Visualization (2D) Load fish_target.txt and fish_source.txt datasets and visualize the initial 2D point distributions using Matplotlib STEP 1 - Before Registration (3D) Convert 2D data to 3D point clouds and view the misalignment 🔴 Red = Target point cloud 🔵 Blue = Source point cloud (unaligned) STEP 2 - CPD Algorithm Execution Watch the iterative optimization process in real-time as the algorithm calculates: Gaussian kernel matrix G (spatial relationships) Weight matrix W (deformation field) Progressive transformation Y = Y + GW STEP 3 - After Registration Results Compare the final alignment: 🔴 Red = Target point cloud 🟢 Green = Registered source point cloud (transformed) 🎓 KEY CONCEPTS EXPLAINED • Deformable Registration vs Rigid Registration • Non-rigid transformation preserving local topology • Gaussian Mixture Model (GMM) probabilistic framework • Iterative optimization convergence • Point correspondence estimation • Spatial coherence preservation 💻 TECHNOLOGIES & LIBRARIES Python 3.x pycpd (Coherent Point Drift implementation) Open3D (3D point cloud processing & visualization) NumPy (numerical computations) Matplotlib (2D/3D plotting) functools (callback functions) 🔗 USEFUL RESOURCES 📁 Full Source Code: https://github.com/1904jonathan/Parde... 📂 GitHub Repository: https://github.com/1904jonathan/Parde... 📄 Original CPD Paper: https://arxiv.org/abs/0905.2635 📖 pycpd Documentation: https://github.com/siavashk/pycpd 🌐 Open3D Documentation: http://www.open3d.org/ 🎯 WHO IS THIS FOR? ✔️ Computer Vision students and researchers ✔️ Machine Learning engineers working with 3D data ✔️ Robotics developers (SLAM, object recognition) ✔️ Medical imaging professionals (organ registration) ✔️ 3D scanning and reconstruction specialists ✔️ Point cloud processing beginners ✔️ Python developers learning spatial algorithms 💡 REAL-WORLD APPLICATIONS • Medical image registration (CT/MRI alignment) • 3D object recognition and tracking • Autonomous vehicle perception (LiDAR data) • Augmented Reality alignment • Motion capture and animation • Archaeological artifact reconstruction • Industrial quality control inspection 📈 NEXT VIDEOS IN SERIES 🔜 Rigid Point Cloud Registration (ICP Algorithm) 🔜 Affine CPD Registration 🔜 Advanced CPD Parameters Tuning 🔜 Real-time Point Cloud Processing 🔜 Multi-cloud Registration Techniques 🔔 SUBSCRIBE for more computer vision tutorials, 3D reconstruction techniques, and Python machine learning content! 👍 Like this video if you learned something new about point cloud registration! 💬 Comment below: What 3D registration challenges are you facing? 🔄 Share with anyone learning computer vision or working with point clouds! KEYWORDS & TAGS #CoherentPointDrift #CPD #PointCloudRegistration #ComputerVision #Python #MachineLearning #3DReconstruction #Open3D #DeformableRegistration #PointCloud #3DProcessing #PythonTutorial #OpenSource #DataScience #AI #3DAlignment #SpatialComputing #Robotics #SLAM #ImageProcessing #3DScanning #NumPy #Matplotlib #Registration #NonRigidRegistration #ShapeMatching #ProgrammingTutorial
Comments















![Пожалуй, главное заблуждение об электричестве [Veritasium]](https://imager.clipsaver.ru/6Hv2GLtnf2c/max.jpg)
