OmniPlanner: Universal Exploration and Inspection Path Planning across Robot Morphologies скачать в хорошем качестве
OmniPlanner: Universal Exploration and Inspection Path Planning across Robot Morphologies
4 недели назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: OmniPlanner: Universal Exploration and Inspection Path Planning across Robot Morphologies в качестве 4k
У нас вы можете посмотреть бесплатно OmniPlanner: Universal Exploration and Inspection Path Planning across Robot Morphologies или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон OmniPlanner: Universal Exploration and Inspection Path Planning across Robot Morphologies в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
OmniPlanner: Universal Exploration and Inspection Path Planning across Robot Morphologies
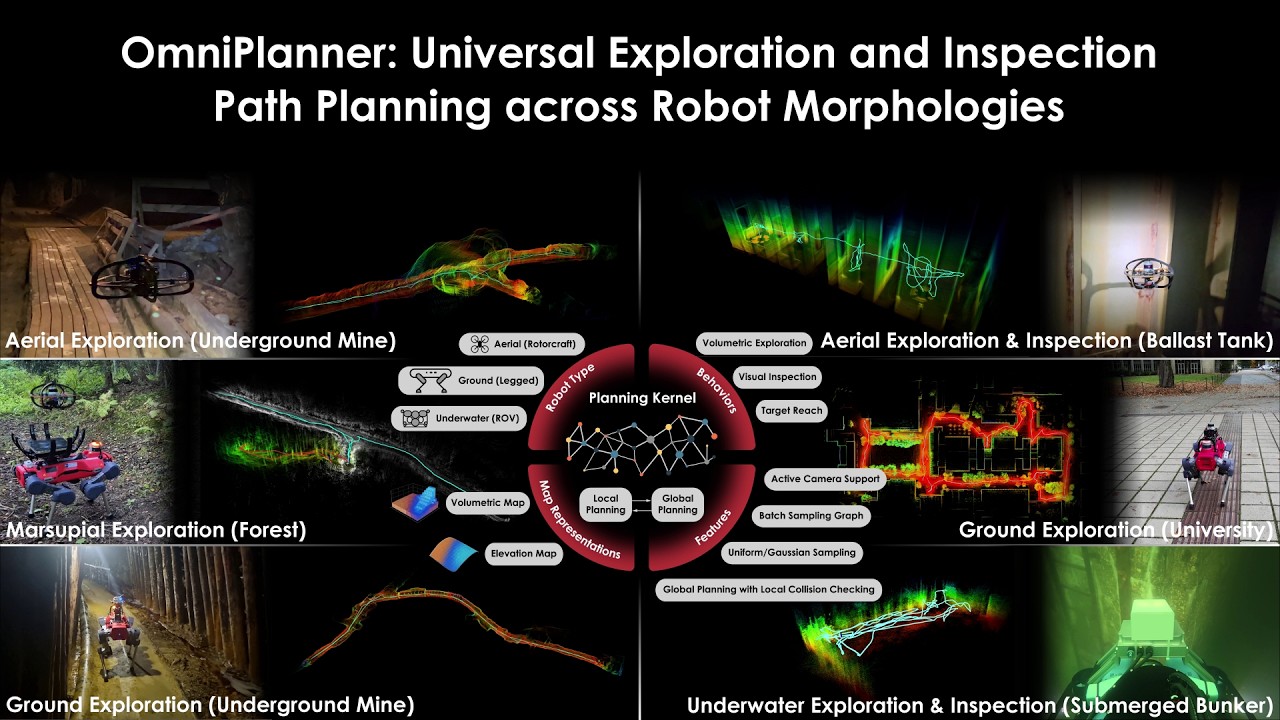
Autonomous robotic systems are increasingly deployed for mapping, monitoring, and inspection in complex and unstructured environments. However, most existing path planning approaches remain domain-specific (i.e., either on air, land, or sea), limiting their scalability and cross-platform applicability. This article presents OmniPlanner, a unified planning framework for autonomous exploration and inspection across aerial, ground, and underwater robots. The method integrates volumetric exploration and viewpoint-based inspection, alongside target reach behaviors within a single modular architecture, complemented by a platform abstraction layer that captures morphology-specific sensing, traversability and motion constraints. This enables the same planning strategy to generalize across distinct mobility domains with minimal retuning. The framework is validated through extensive simulation studies and field deployments in underground mines, industrial facilities, forests, submarine bunkers, and structured outdoor environments. Across these diverse scenarios, OmniPlanner demonstrates robust performance, consistent cross-domain generalization, and improved exploration and inspection efficiency compared to representative state-of-the-art baselines.
Comments