Tensore d’inerzia di un sistema di masse puntiformi скачать в хорошем качестве
Tensore d’inerzia di un sistema di masse puntiformi
1 месяц назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Tensore d’inerzia di un sistema di masse puntiformi в качестве 4k
У нас вы можете посмотреть бесплатно Tensore d’inerzia di un sistema di masse puntiformi или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Tensore d’inerzia di un sistema di masse puntiformi в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Tensore d’inerzia di un sistema di masse puntiformi
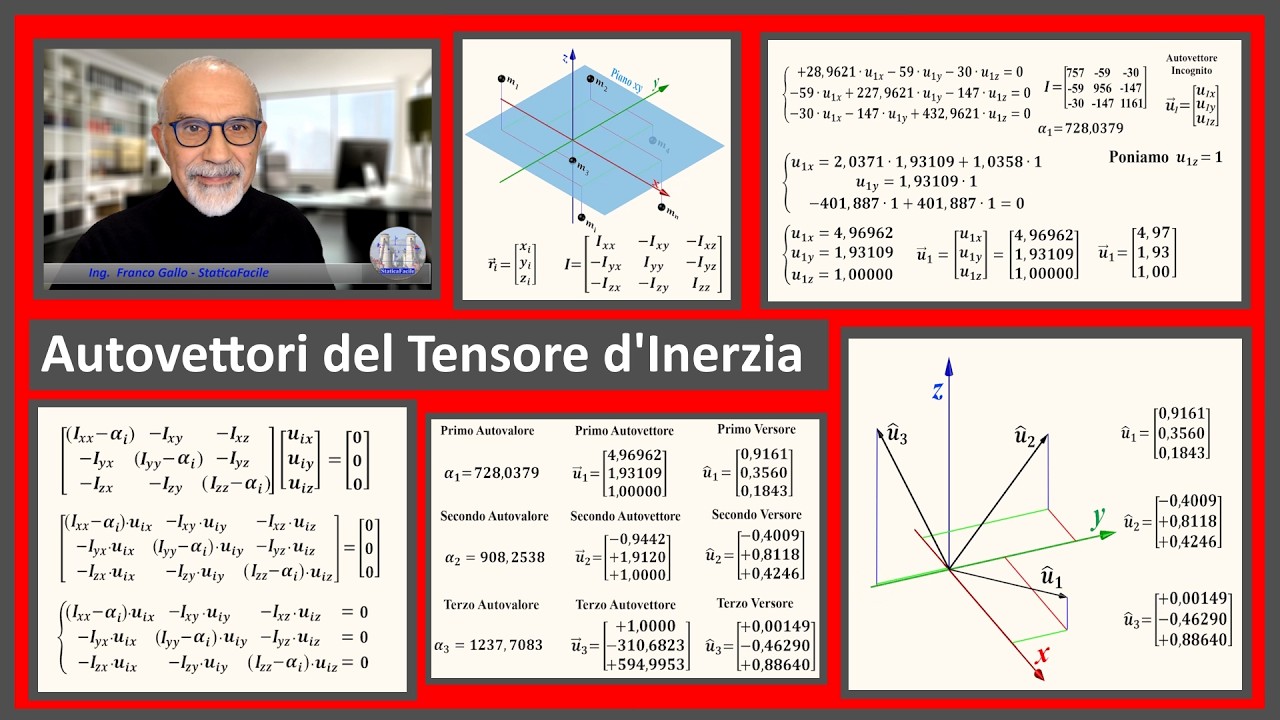
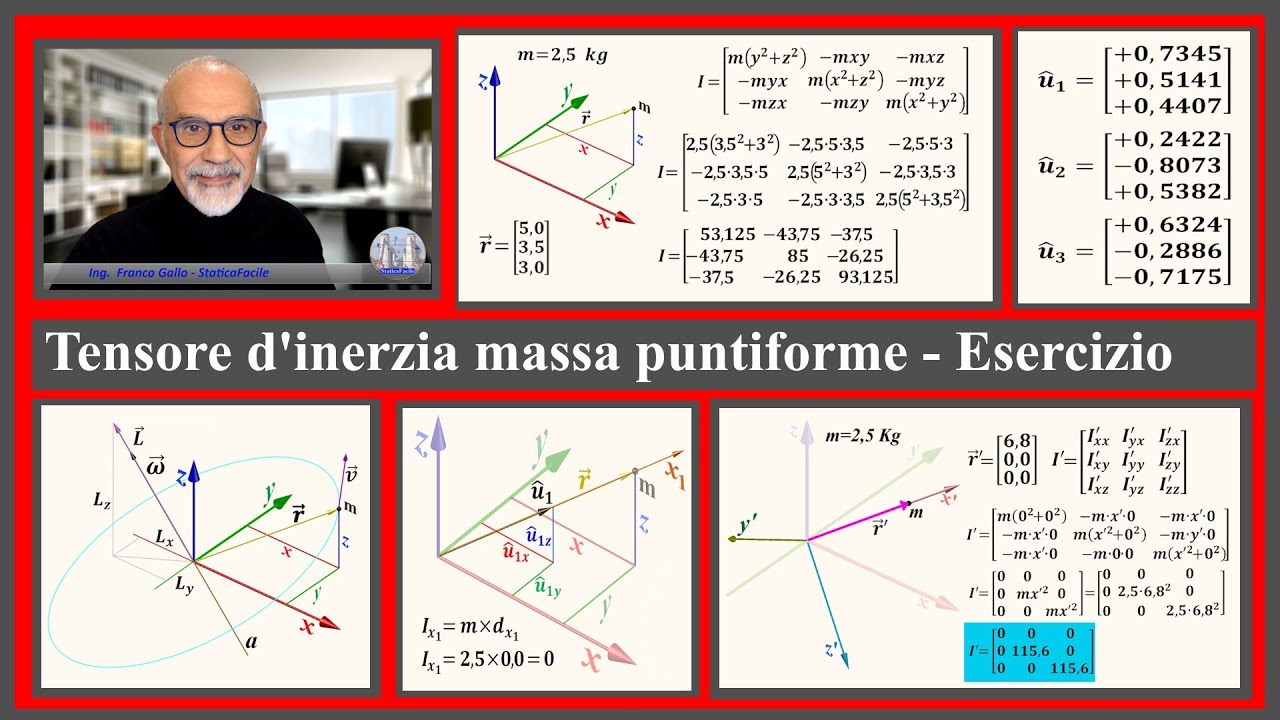
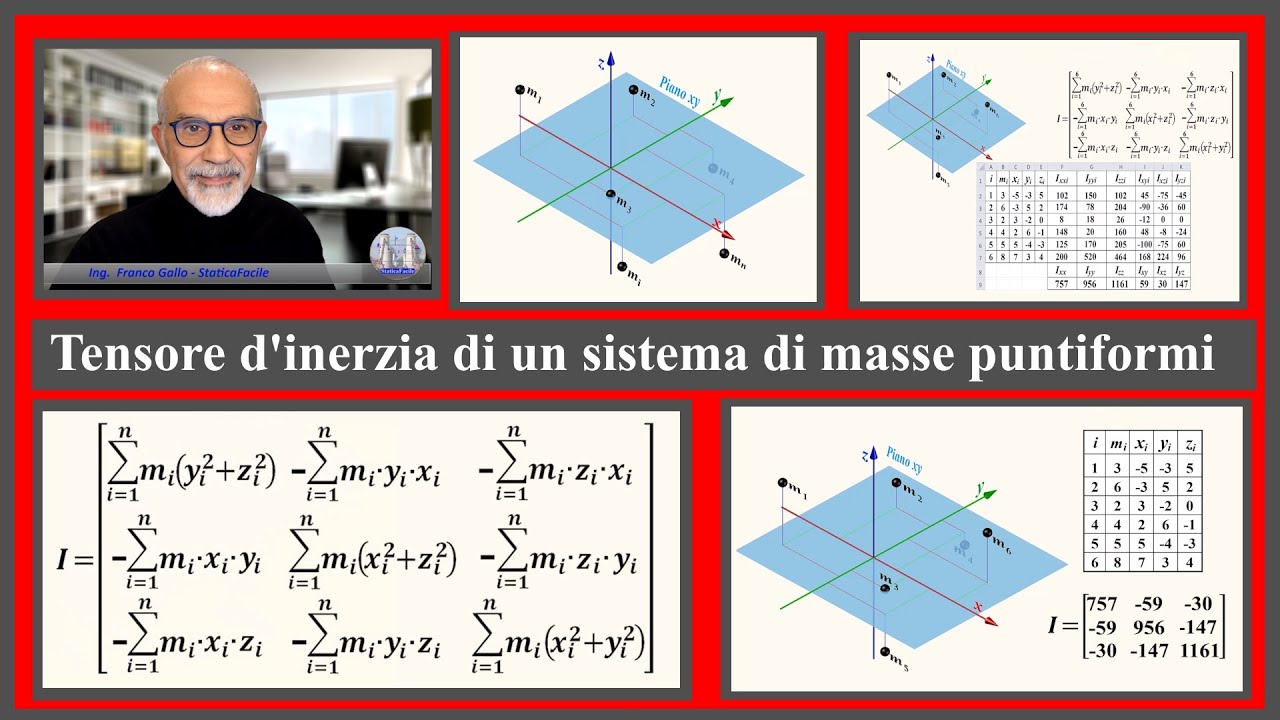
Il tensore d’inerzia è uno strumento fondamentale della meccanica razionale e della dinamica dei corpi rigidi, perché descrive in modo completo come la massa di un sistema è distribuita rispetto a un riferimento spaziale. Nel caso di un sistema discreto di masse puntiformi, il tensore d’inerzia è una matrice simmetrica 3×3 che dipende sia dai valori delle masse sia dalle loro coordinate nello spazio tridimensionale XYZ. A differenza del momento d’inerzia scalare, valido solo per un asse prefissato, il tensore consente di analizzare il moto rotatorio rispetto a qualunque asse passante per l’origine del sistema di riferimento scelto. Per sistemi discreti di masse puntiformi, il tensore d’inerzia dipende esclusivamente dalla distribuzione geometrica delle masse e dai loro valori, risultando particolarmente adatto a esempi didattici e applicazioni ingegneristiche. In meccanica, il momento d’inerzia misura la resistenza di un sistema alla rotazione attorno a un asse. Per un sistema di masse puntiformi nello spazio tridimensionale, il momento d’inerzia non è un numero unico ma dipende dall’asse di rotazione considerato. In generale, fissato un sistema di riferimento cartesiano (OXYZ), il momento d’inerzia rispetto a un asse è la somma, su tutte le masse, del prodotto tra la massa e il quadrato della distanza della massa stessa dall’asse. Questa definizione rende immediatamente chiaro che la distribuzione spaziale delle masse, ovvero le loro coordinate, è cruciale quanto il loro valore. I momenti d’inerzia di una sola massa puntiforme in un sistema XYZ furono spiegati in questa lezione • Momenti d'inerzia di una massa puntiforme In queste due altre lezioni spiegai il tensore d’inerzia per una massa puntiforme • Tensore d'Inerzia di una massa puntiforme • Tensore d'inerzia di una massa puntiforme.... I momenti d’inerzia rispetto agli assi (X), (Y) e (Z) sono definiti come: Ixx=SOMMATORIA[mi.(yi^2+zi^2) Iyy=SOMMATORIA[mi.(xi^2+zi^2) Izz=SOMMATORIA[mi.(xi^2+yi^2) Ogni momento d’inerzia “ignora” la coordinata lungo l’asse di rotazione e considera solo la distanza perpendicolare all’asse stesso. Questo è un punto concettuale importante: una massa può avere coordinata (x) molto grande, ma se si ruota attorno all’asse (X), tale coordinata non contribuisce al momento d’inerzia. Oltre ai momenti d’inerzia principali, nei sistemi tridimensionali compaiono i prodotti d’inerzia: Ixy=Iyx=SOMMATORIA[mi.xi.yi] Ixz=Izx=SOMMATORIA[mi.xi.zi] Iyz=Izy=SOMMATORIA[mi.yi.zi] Essi misurano il “disallineamento” della distribuzione di massa rispetto agli assi cartesiani. Se il sistema è simmetrico rispetto a un piano coordinato, il prodotto d’inerzia associato si annulla. Dal punto di vista fisico, prodotti d’inerzia diversi da zero indicano che gli assi scelti non sono assi principali di inerzia. Per un sistema di masse puntiformi mi con coordinate xi yi zi il tensore d’inerzia rispetto all’origine è definito da una matrice simmetrica 3x3 così composta: Prima Riga Ixx -Iyx -Izx Seconda Riga -Ixy Iyy -Izy Terza Riga -Ixz -Iyz Izz I termini sulla diagonale principale Ixx Iyy Izz rappresentano i momenti d’inerzia rispetto agli assi X, Y e Z, mentre quelli fuori diagonale sono i prodotti d’inerzia, indicatori dell’assenza di simmetria rispetto alle coppie di assi, questi ultimi recano il segno meno. Nella videolezione viene proposto un esempio con un sistema di 6 masse puntiformi. Le masse sono distribuite in modo chiaramente asimmetrico nello spazio (XYZ). I dati sono i seguenti: m1=3 x1=-5 y1=-3 z1=5 m2=6 x2=-3 y2=5 z2=2 m3=2 x3=3 y3=-2 z3=0 m4=4 x4=2 y4=6 z4=-1 m5=5 x5=5 y5=-4 z5=-3 m6=8 x6=7 y6=3 z6=4 I calcoli vengono sviluppati usando un foglio elettronico e applicando e formule di cui sopra. I risultati sono i seguenti: Ixx=757 kg.m^2 Iyy=956 kg.m^2 Izz=1161 kg.m^2 Ixy=Iyx=59 kg.m^2 Ixz=Izx=30 kg.m^2 Iyz=Izy=147 kg.m^2 Qui trovi i calcoli di dettaglio • Momenti d’inerzia di un sistema di masse p... Osserviamo che nel calcolo di Izz entrano solo le coordinate xi e yi quindi le masse con valori elevati di x o y (come la massa 6 con x=7, y=3) contribuiscono in modo preponderante. Al contrario, nel momento Ixx contano solo y e z, quindi masse lontane dal piano YZ diventano rilevanti. I prodotti d’inerzia, in questo caso, risultano in generale non nulli, segnalando che gli assi cartesiani non coincidono con quelli principali del sistema. Il tensore d’inerzia del sistema di sei masse è composto così: Prima Riga 757 -59 -30 Seconda Riga -58 956 -147 Terza Riga -30 -147 1161 Questa matrice contiene tutte le informazioni necessarie per lo studio del moto rotatorio del sistema. L’esempio rende evidente il ruolo dei prodotti d’inerzia e chiarisce perché, in molte applicazioni pratiche, sia conveniente determinare gli assi principali per semplificare l’analisi dinamica.
Comments