Mojtaba Sharifi on Personalized Control of Lower-limb Exoskeletons | Toronto AIR Seminar скачать в хорошем качестве
Mojtaba Sharifi on Personalized Control of Lower-limb Exoskeletons | Toronto AIR Seminar
4 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Mojtaba Sharifi on Personalized Control of Lower-limb Exoskeletons | Toronto AIR Seminar в качестве 4k
У нас вы можете посмотреть бесплатно Mojtaba Sharifi on Personalized Control of Lower-limb Exoskeletons | Toronto AIR Seminar или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Mojtaba Sharifi on Personalized Control of Lower-limb Exoskeletons | Toronto AIR Seminar в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
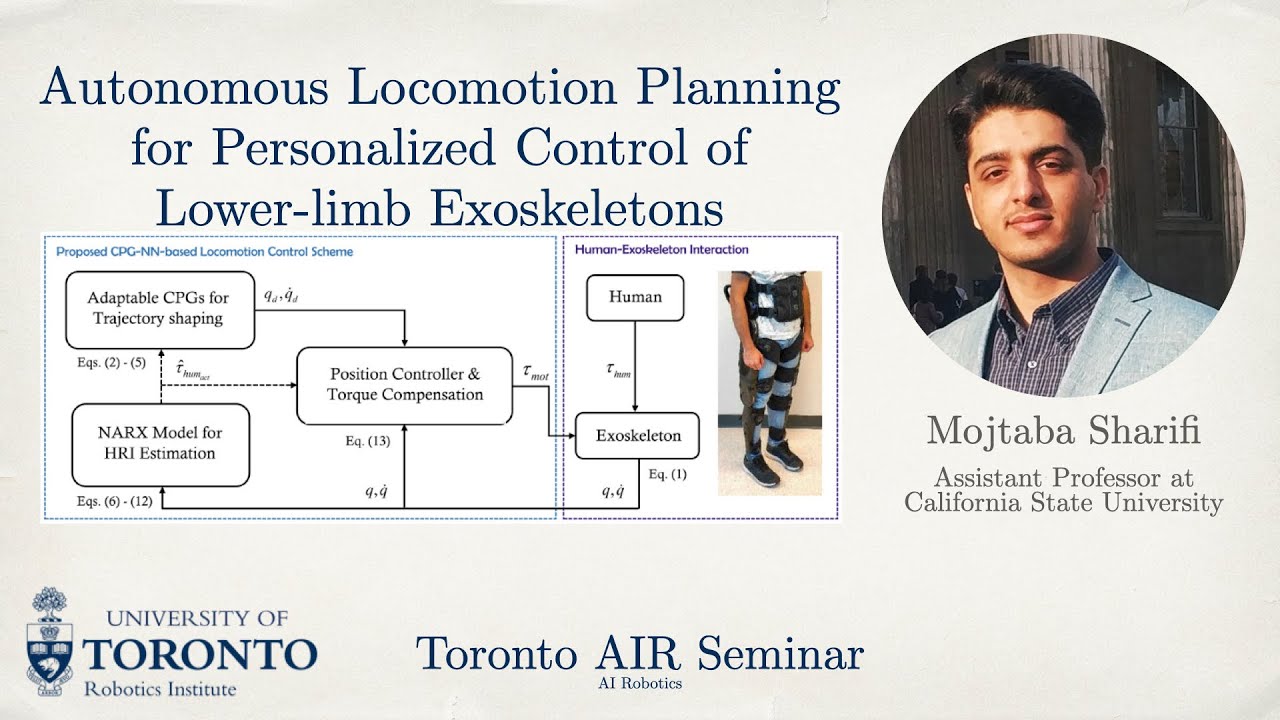
Mojtaba Sharifi on Personalized Control of Lower-limb Exoskeletons | Toronto AIR Seminar
Abstract: Globally, millions of people have experienced a stroke, spinal cord injury, multiple sclerosis, and cerebral palsy resulting in physical impairments. To improve their quality of life, assistive robotic systems are developed to help these individuals in routine activities as well as during therapy programs. In this regard, powered lower-limb exoskeletons have been invented to assist and rehabilitate individuals with neurological impairments. Despite all of the endeavors in designing and deploying these systems for medical purposes, compliant and personalized interaction between the robot and wearer is an important safety issue that still needs to be addressed In this talk, an autonomous strategy will be presented for locomotion trajectory planning of lower-limb exoskeletons by defining a novel set of adaptive central pattern generators (ACPGs) to facilitate safe and compliant interaction with the human. The proposed ACPG dynamics for each exoskeleton joint updates the motion frequency and amplitude based on the observed HRI torque, which is also coupled with adjacent joints’ CPGs to regulate their phase differences in real-time. In experimental studies, it will be demonstrated that active torques can be applied to different joints to significantly modify and personalize the gait features within a short period of time. Paper: "Adaptive CPG-based gait planning with learning-based torque estimation and control for exoskeletons" by Sharifi, Mehr, Mushahwar, and Tavakoli. IEEE Robotics and Automation Letters, 2021 https://ieeexplore.ieee.org/abstract/... "Autonomous locomotion trajectroy shaping and nonlinear control for lower-limb exoskeletons" by Sharifi, Mehr, Mushahwar, and Tavakoli. IEEE/ASME Transactions on Mechatronics (under review) Bio: Mojtaba Sharifi is an assistant professor at California State University, USA. Prior to that, he was a postdoctoral research fellow in the Department of Electrical and Computer Engineering and the Department of Medicine, University of Alberta, Canada. The areas of his interdisciplinary research include intelligent control, dynamics, and design of robots (used in biomedical applications, such as rehabilitation, surgery, and imaging), autonomous human-robot interaction (using impedance control and learning), wearable and assistive robotics (exoskeletons, prostheses, and orthoses), haptics, collaborative robotics, and tele-robotics (using bilateral and multilateral control), control and modeling of musculoskeletal systems, and biological systems. He has published more than 50 scientific articles and chapters in well-respected journals, conferences and books. He will be the first organizer of a workshop on “Intelligent Control Methods and Machine Learning Algorithms for Human-Robot Interaction and Assistive Robotics” at IEEE Conference on Robotics and Automation (ICRA) 2022 in Philadelphia, USA. More details: https://sites.google.com/ualberta.ca/... Toronto AIR Seminar: The Toronto AI Robotics Seminar Series is a set of events featuring young robotics and AI experts. The talks are given by local as well as global speakers and organized by the Faculty and Students at University of Toronto’s Department of Computer Science. We welcome students, researchers and robotics enthusiasts from around the world to join us and interact with the Toronto Robotics Community. Find out more at: https://robotics.cs.toronto.edu/toron...
Comments
















![[Webcast] - Simulations as a tool for human-centered exoskeleton design](https://imager.clipsaver.ru/Vt8M31wVUc0/max.jpg)
![[ICON Spring26 Seminar] Harry Asada (MIT) #robotics #control #mpc](https://imager.clipsaver.ru/eUpeTgApab8/max.jpg)