Robot Motion Planning - Artificial Potential Field Method скачать в хорошем качестве
Robot Motion Planning - Artificial Potential Field Method
5 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Robot Motion Planning - Artificial Potential Field Method в качестве 4k
У нас вы можете посмотреть бесплатно Robot Motion Planning - Artificial Potential Field Method или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Robot Motion Planning - Artificial Potential Field Method в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
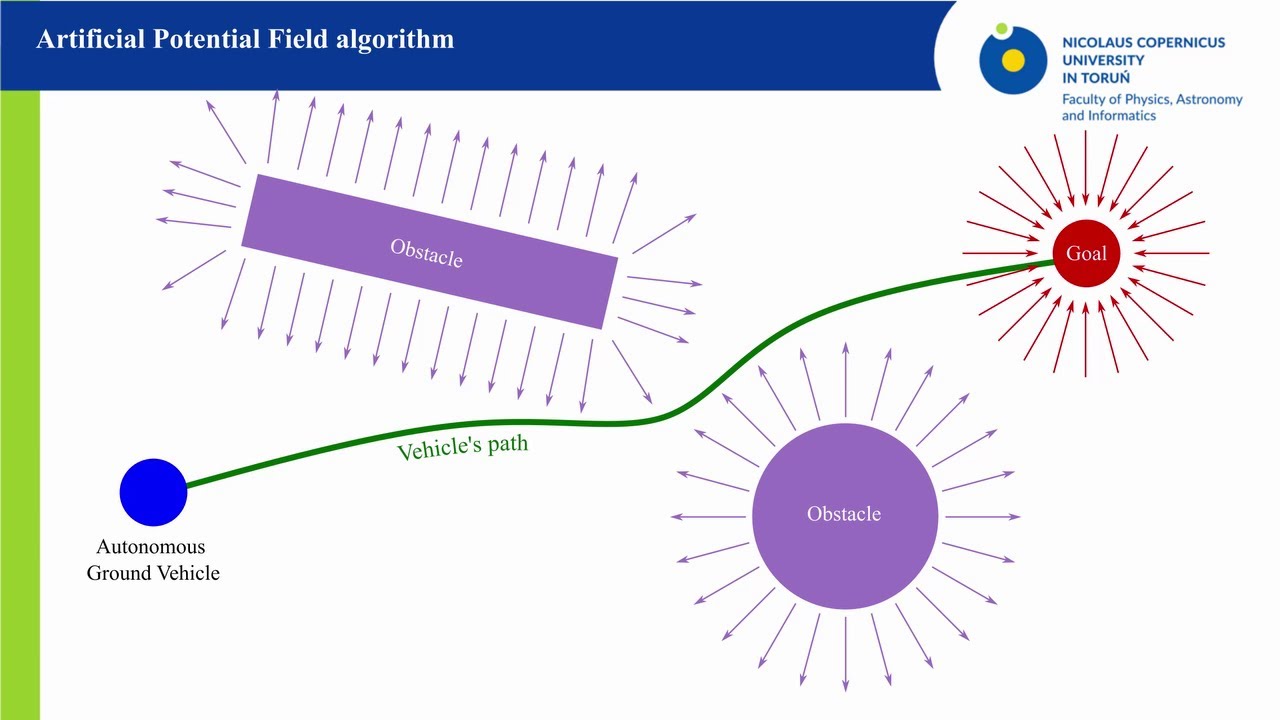
Robot Motion Planning - Artificial Potential Field Method
This video explains artificial potential field method used in Robot Motion Planning. Gradient descent, Brushfire algorithm for distance computation and Wavefront Path planner are also covered.
Comments



![Motion Planning Algorithms (RRT, RRT*, PRM) - [MIT 6.881 Final Project]](https://imager.clipsaver.ru/gP6MRe_IHFo/max.jpg)