How to control DC motors with PIC16F877A and L293D-(Proteus + MikroC) скачать в хорошем качестве
How to control DC motors with PIC16F877A and L293D-(Proteus + MikroC)
11 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: How to control DC motors with PIC16F877A and L293D-(Proteus + MikroC) в качестве 4k
У нас вы можете посмотреть бесплатно How to control DC motors with PIC16F877A and L293D-(Proteus + MikroC) или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон How to control DC motors with PIC16F877A and L293D-(Proteus + MikroC) в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
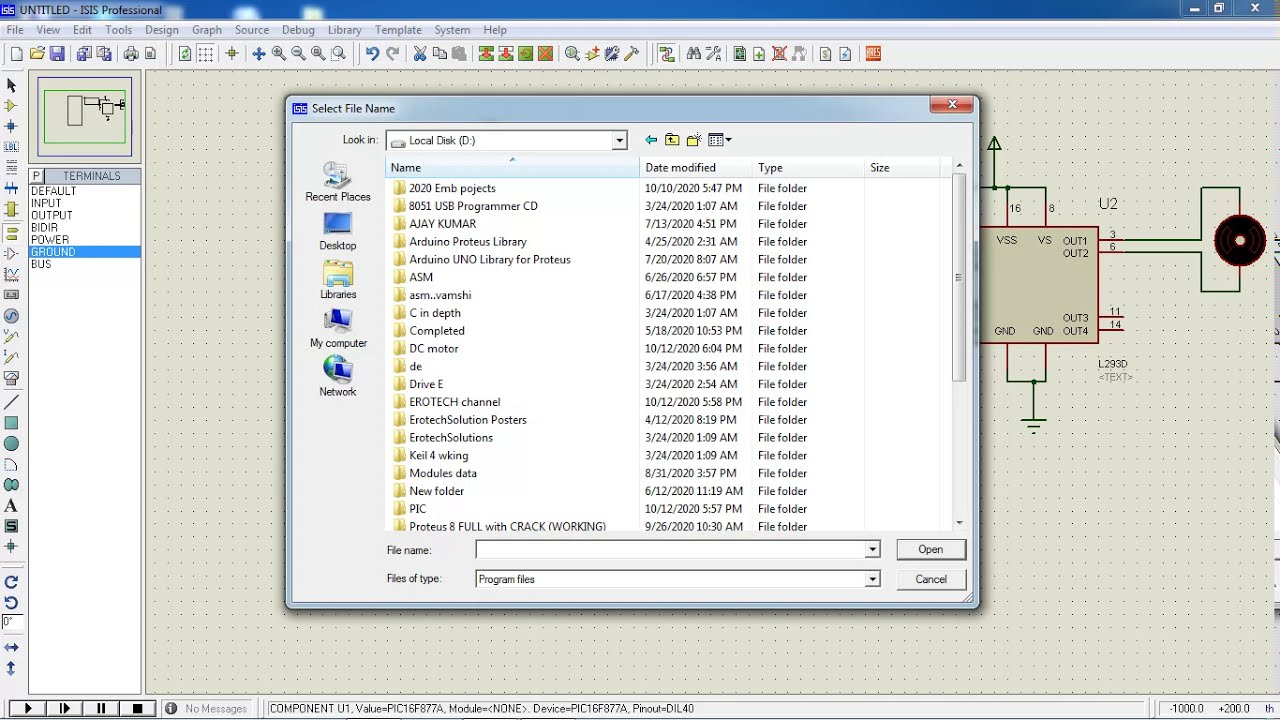
How to control DC motors with PIC16F877A and L293D-(Proteus + MikroC)
It is very easy to control DC-Motors using PIC16F877A and L293D(H-Bridge). By using PWM(Pulse Width Modulation) we can reduce the RPM of the motor. Here is a very simple code in mikroC to control 4 DC-motors void main() { trisc2_bit=0; //set portc-pin 2 as output pin for PWM1 trisb=0x00; //set port b os output port portc=0x00; //reset port c PWM1_Init(5000); //initialise PWM1 at 5KHz PWM1_Start(); //start PWM1 PWM1_Set_Duty(127); //set PWM Duty cycle while(1) // start infinit loop { portb=0x01; //signal to motor 1 forward direction delay_ms(200); portb=0x04; //signal to motor 2 forward direction delay_ms(200); portb=0x10; //signal to motor 3 forward direction delay_ms(200); portb=0x40; //signal to motor 4 forward direction delay_ms(200); portb=0x80; //signal to motor 4 reverse direction delay_ms(200); portb=0x20; //signal to motor 3 reverse direction delay_ms(200); portb=0x08; //signal to motor 2 reverse direction delay_ms(200); portb=0x02; //signal to motor 1 reverse direction delay_ms(200); } //end loop } //end main copy and paste the code in mikroC and try it......... Thanks for watching
Comments