ROS 2 Topics vs Services vs Actions — Clear & Simple Guide скачать в хорошем качестве
ROS 2 Topics vs Services vs Actions — Clear & Simple Guide
2 месяца назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: ROS 2 Topics vs Services vs Actions — Clear & Simple Guide в качестве 4k
У нас вы можете посмотреть бесплатно ROS 2 Topics vs Services vs Actions — Clear & Simple Guide или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон ROS 2 Topics vs Services vs Actions — Clear & Simple Guide в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
ROS 2 Topics vs Services vs Actions — Clear & Simple Guide
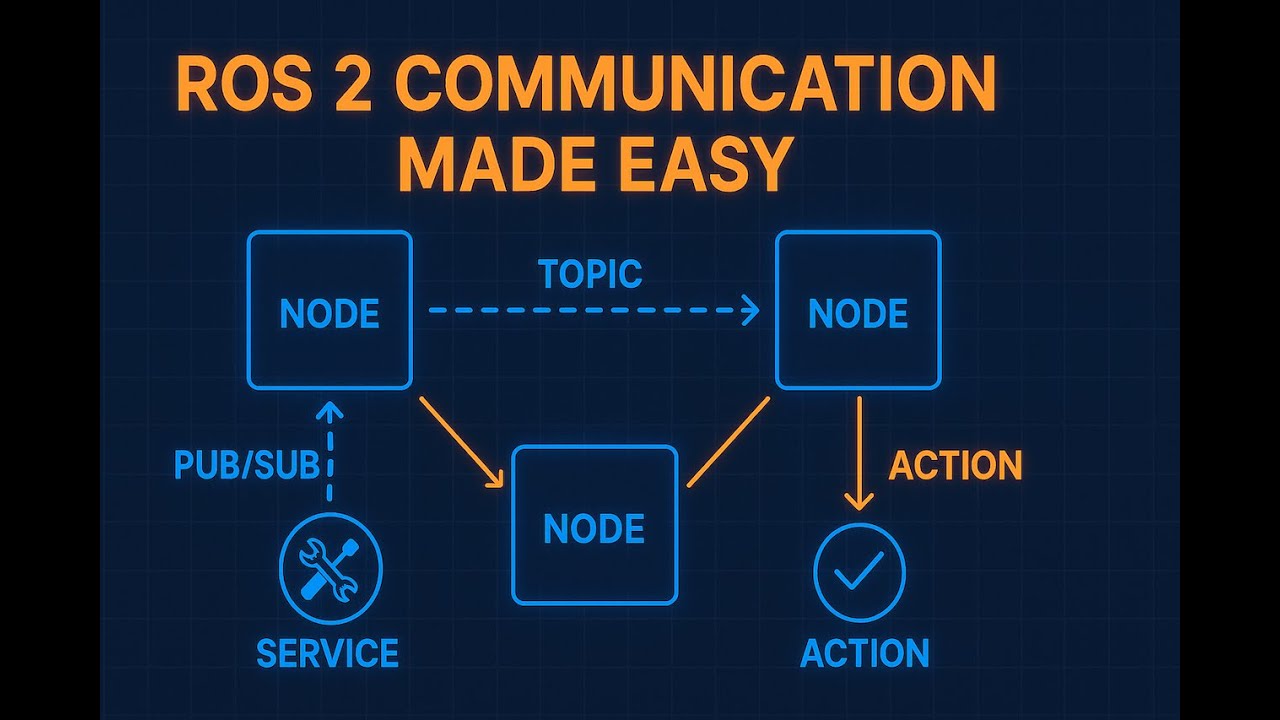
Welcome to TechLab ! ROS 2 Communication Explained — Nodes, Topics, Services & Actions (with Python Examples!) In this video, we break down how communication really works in ROS 2 — the backbone of any modern robotics system. Whether you're a beginner or transitioning from ROS 1, this guide will help you clearly understand how nodes exchange data using Topics, Services, and Actions. You'll learn: 🔹 What Nodes are and how they interact 🔹 How the Publisher/Subscriber model works 🔹 When to use Services (Request/Response) 🔹 How Actions handle long-running tasks with feedback 🔹 How node discovery works in ROS 2 🔹 Real Python examples for publishers, subscribers, service servers/clients, and action servers/clients By the end of this video, you'll have a strong foundation to build real robotics applications in ROS 2. Music: bensound.com License code: 9VLYQ3RGQKDBOPU4 Royalty Free Music: https://www.bensound.com License code: 8AN16CM8OJDDXAVJ
Comments