Quantitative evaluation of 20 LiDAR Odometry algorithms, скачать в хорошем качестве
Quantitative evaluation of 20 LiDAR Odometry algorithms,
4 дня назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Quantitative evaluation of 20 LiDAR Odometry algorithms, в качестве 4k
У нас вы можете посмотреть бесплатно Quantitative evaluation of 20 LiDAR Odometry algorithms, или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Quantitative evaluation of 20 LiDAR Odometry algorithms, в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
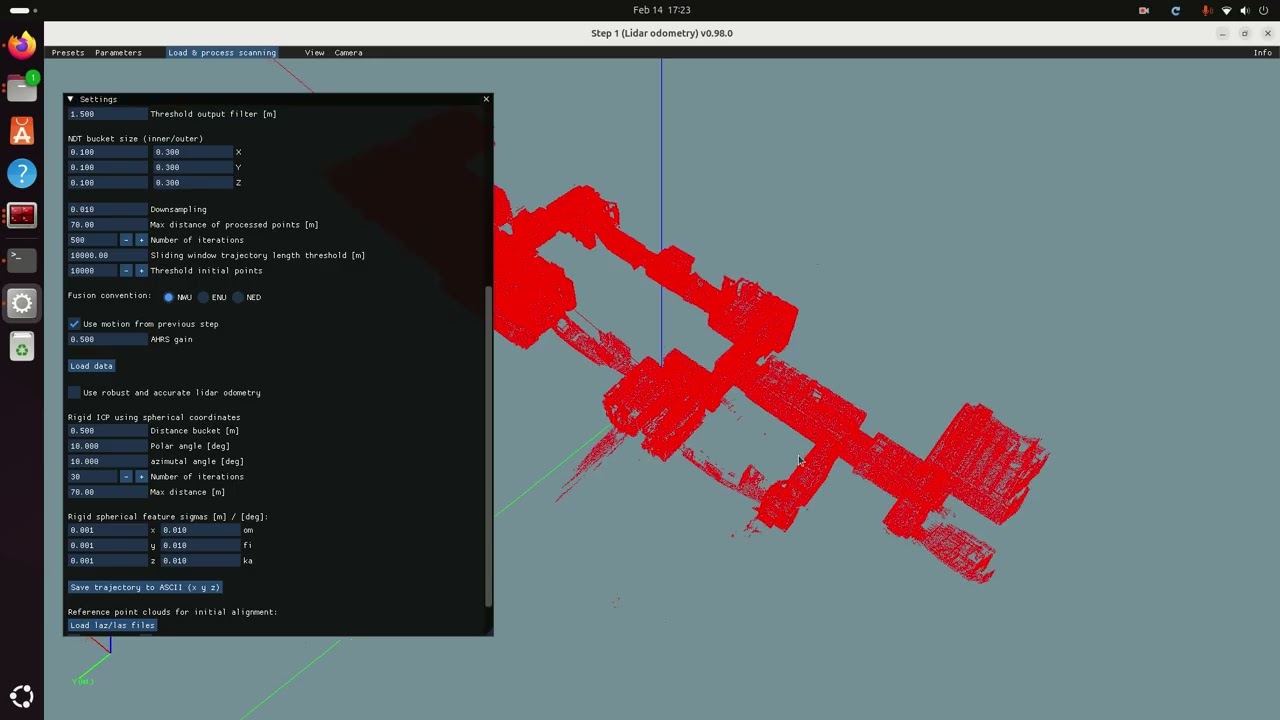
Quantitative evaluation of 20 LiDAR Odometry algorithms,
In this movie we quantitatively compare HDMapping-LIO, lidar_odometry_ros_wrapper, RESPLE, GenZ, I2EKF-LO, LIO-EKF, iG-LIO, GLIM, Point-LIO, DLIO, SLICT, KISS-ICP, Faster-LIO, VoxelMap, DLO, CT-ICP, FAST-LIO, LOAM-Livox, Lego-LOAM. Dataset: https://charleshamesse.github.io/bunk... Project: https://github.com/MapsHD/HDMapping
Comments