Forward and Inverse Kinematics for ABB IRB-140 Industrial Robot Arms (Remasterized Sound) скачать в хорошем качестве
Forward and Inverse Kinematics for ABB IRB-140 Industrial Robot Arms (Remasterized Sound)
3 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Forward and Inverse Kinematics for ABB IRB-140 Industrial Robot Arms (Remasterized Sound) в качестве 4k
У нас вы можете посмотреть бесплатно Forward and Inverse Kinematics for ABB IRB-140 Industrial Robot Arms (Remasterized Sound) или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Forward and Inverse Kinematics for ABB IRB-140 Industrial Robot Arms (Remasterized Sound) в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
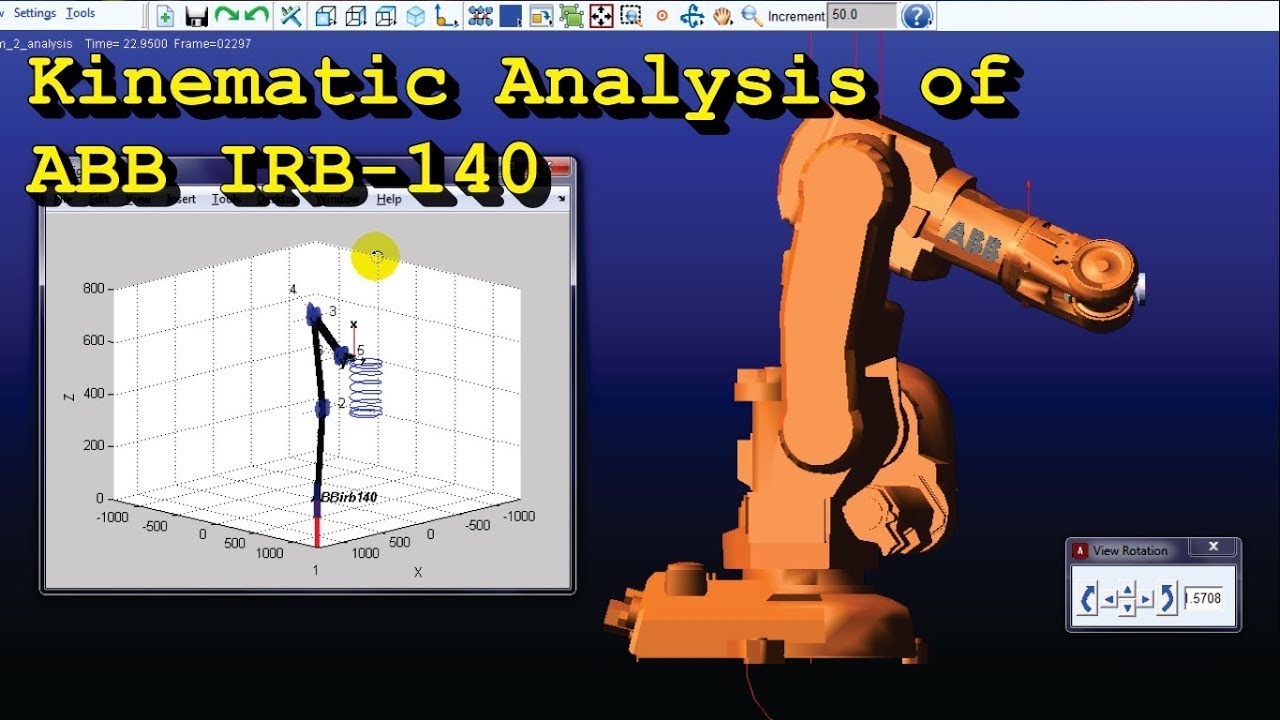
Forward and Inverse Kinematics for ABB IRB-140 Industrial Robot Arms (Remasterized Sound)
Full paper: https://www.researchgate.net/publicat... This is a supplemental explanation video for: Baquero-Suárez, Mauro and Heredia, Ricardo Ramírez (2013). Kinematics, dynamics and evaluation of energy consumption for ABB IRB-140 serial robots in the tracking of a path. In: The 2nd International Congress of Engineering Mechatronics and Automation (CIIMA2013). 1st Volume, DOI: 10.13140/2.1.3436.5448. Abstract: In this paper, the ABB IRB-140 manipulator is studied, in which its kinematics (forward -inverse), differential kinematics (forward -inverse) and dynamics (torques in each joint) are calculated. The numerical matrix operations were solved using MATLAB and the tracking of paths was simulated using SOLID EDGE, taking into account the detection of collisions. Additionally, mass centers and inertia tensors of each link required in dynamics equations of the manipulator were identified. Through Lagrangian formulation, the needed energy for the path tracking designated was calculated. By placing this path in different positions inside its workspace, the minor energy consumption for tracking was determined. The main acknowledgement of this work are the performed equations, which allow to know angles, velocities, accelerations and torque values generated in each joint; this information is fundamental for the correct execution of a specified task. Music of this video: https://www.bensound.com #RobotArm #ABBRobot #baqumauMechatronics #InverseKinematics Visit my channel: @baqumau-Mechatronics
Comments








![[2026] Feeling Good Mix - English Deep House, Vocal House, Nu Disco | Emotional / Intimate Mood](https://imager.clipsaver.ru/cxLdtvzf2sI/max.jpg)