A receding-horizon multi-contact motion planner for legged robots in challenging environments скачать в хорошем качестве
A receding-horizon multi-contact motion planner for legged robots in challenging environments
4 дня назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: A receding-horizon multi-contact motion planner for legged robots in challenging environments в качестве 4k
У нас вы можете посмотреть бесплатно A receding-horizon multi-contact motion planner for legged robots in challenging environments или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон A receding-horizon multi-contact motion planner for legged robots in challenging environments в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
A receding-horizon multi-contact motion planner for legged robots in challenging environments
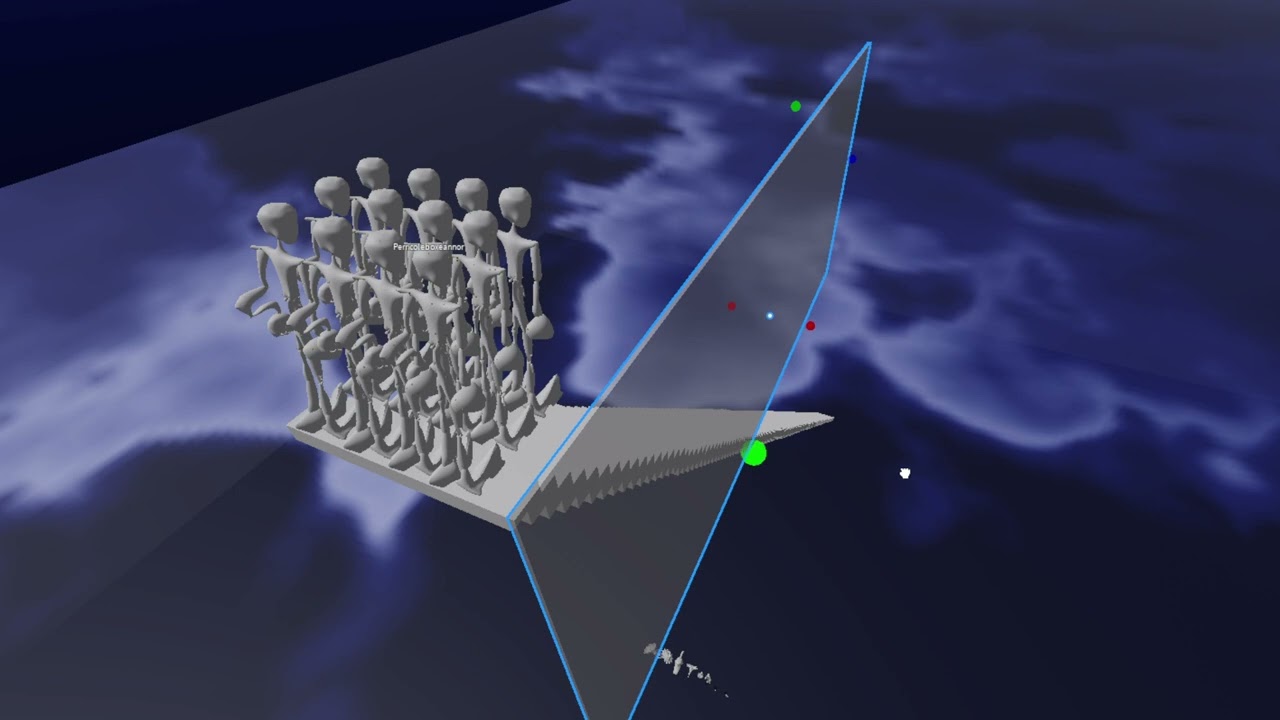
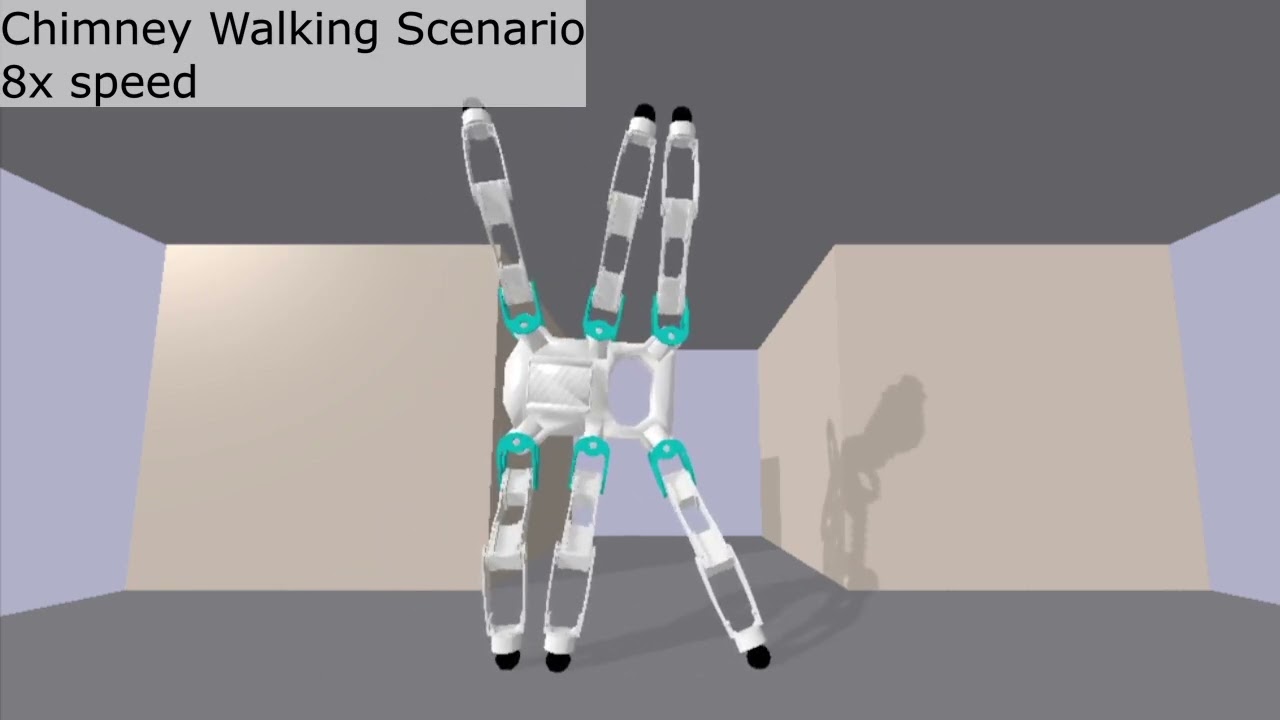
Supplementary video for the article "A receding-horizon multi-contact motion planner for legged robots in challenging environments" submitted to the Robotics and Automation Systems journal. The video shows a hexapod walking in four challenging environments belonging to different classes: The Stepping Stones scenario requires the robot to walk over a ‘river’ using sparse and irregularly placed surfaces. The Wall Walking scenario features a narrow corridor that requires contacts to be formed on a vertical wall. The Chimney Walking Scenario requires a large gap to be crossed using the vertical surfaces exclusively. The Chimney Climbing scenario sees the robot vertically climb up a chimney. Our approach adds new capabilities not found in the state-of-the-art, including rapid re-planning capabilities, reduced susceptibility to contact-critical local minima, and simultaneously planning whole-body linking trajectories alongside the stance sequence.
Comments