STM32 Tutorial #48 - HOWTO use CAN Peripheral скачать в хорошем качестве
STM32 Tutorial #48 - HOWTO use CAN Peripheral
9 месяцев назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: STM32 Tutorial #48 - HOWTO use CAN Peripheral в качестве 4k
У нас вы можете посмотреть бесплатно STM32 Tutorial #48 - HOWTO use CAN Peripheral или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон STM32 Tutorial #48 - HOWTO use CAN Peripheral в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
STM32 Tutorial #48 - HOWTO use CAN Peripheral
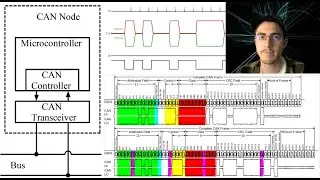
In this video we will be using CAN loopback to send and receive CAN messages. We will be creating the necessary filters to determine which CAN messages are received. A follow-up video covering a real CAN bus with external CAN transceivers and much more details about CAN filters is here: • STM32 Tutorial #49 - HOWTO CAN filters in ... The STM32World wiki: https://stm32world.com/wiki Wiki page about CAN bus: https://stm32world.com/wiki/CAN_bus Wiki page about the STM32 CAN Peripheral: https://stm32world.com/wiki/STM32_CAN How to connect a CAN transceiver: https://stm32world.com/wiki/CANTRANS #STM32 #Tutorial #GettingStarted #STM32CubeIDE #STM32CubeMX #HAL #CAN #CANBus #STM32World 00:00 Intro 00:20 CAN Bus explanation 01:40 The two-wire bus 03:20 A CAN Node - MCU, CAN Controller, Can Transceiver 04:55 Multi-master protocol 06:20 Arbitration on a CAN bus 08:25 CAN IDs 11:35 The basic project 13:14 Configure the CAN peripheral in STM32CubeMX 15:05 Implementing callbacks 16:05 Starting CAN and enabling interrupts 18:18 Transmitting CAN messages 19:00 Creating the CAN IDs 22:00 Building and running 23:20 Implementing the message receive filter 24:30 Explaining ID filter and mask 25:40 Creating the actual filter 29:40 Running with the filter - we now receive the transmitted messages 30:50 Sending message not matching the filter 32:00 Modifying filter to match everything 34:00 Tweaking notification settings 36:20 Briefly mentioning CAN transceivers
Comments