Robotic Compliant Object Prying Using Vision and Force Guided Diffusion Policy скачать в хорошем качестве
Robotic Compliant Object Prying Using Vision and Force Guided Diffusion Policy
1 год назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Robotic Compliant Object Prying Using Vision and Force Guided Diffusion Policy в качестве 4k
У нас вы можете посмотреть бесплатно Robotic Compliant Object Prying Using Vision and Force Guided Diffusion Policy или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Robotic Compliant Object Prying Using Vision and Force Guided Diffusion Policy в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Robotic Compliant Object Prying Using Vision and Force Guided Diffusion Policy
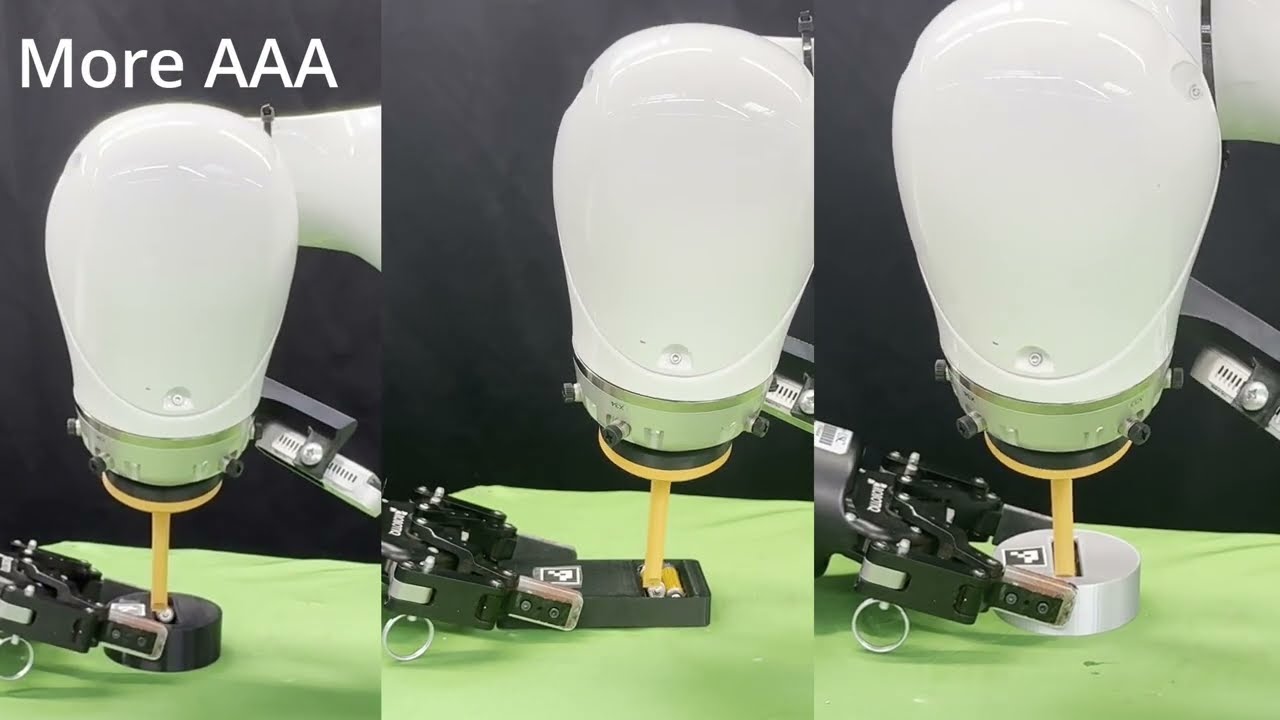
The increasing use of batteries in electric vehicles and consumer products highlights the need for efficient recycling solutions. These devices often combine rigid and compliant components, making robotic disassembly crucial for scalable recycling. Diffusion policy has shown promise for learning robotic skills, but contact-rich tasks require integrating force feedback. We apply diffusion policy with vision and force to a compliant object prying task. To prevent force data from being overshadowed by high-dimensional image data, we propose a method to effectively integrate them. Our approach achieves 96% success on a battery prying task, a 57% improvement over vision-only baselines, and demonstrates zero-shot transfer to unseen objects and batteries. More details can be found in our project website: https://rros-lab.github.io/diffusion-...
Comments











![1 A.M Study Session 📚 [lofi hip hop]](https://imager.clipsaver.ru/lTRiuFIWV54/max.jpg)





