4DOF Hexapod using ROS скачать в хорошем качестве
4DOF Hexapod using ROS
10 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: 4DOF Hexapod using ROS в качестве 4k
У нас вы можете посмотреть бесплатно 4DOF Hexapod using ROS или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон 4DOF Hexapod using ROS в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
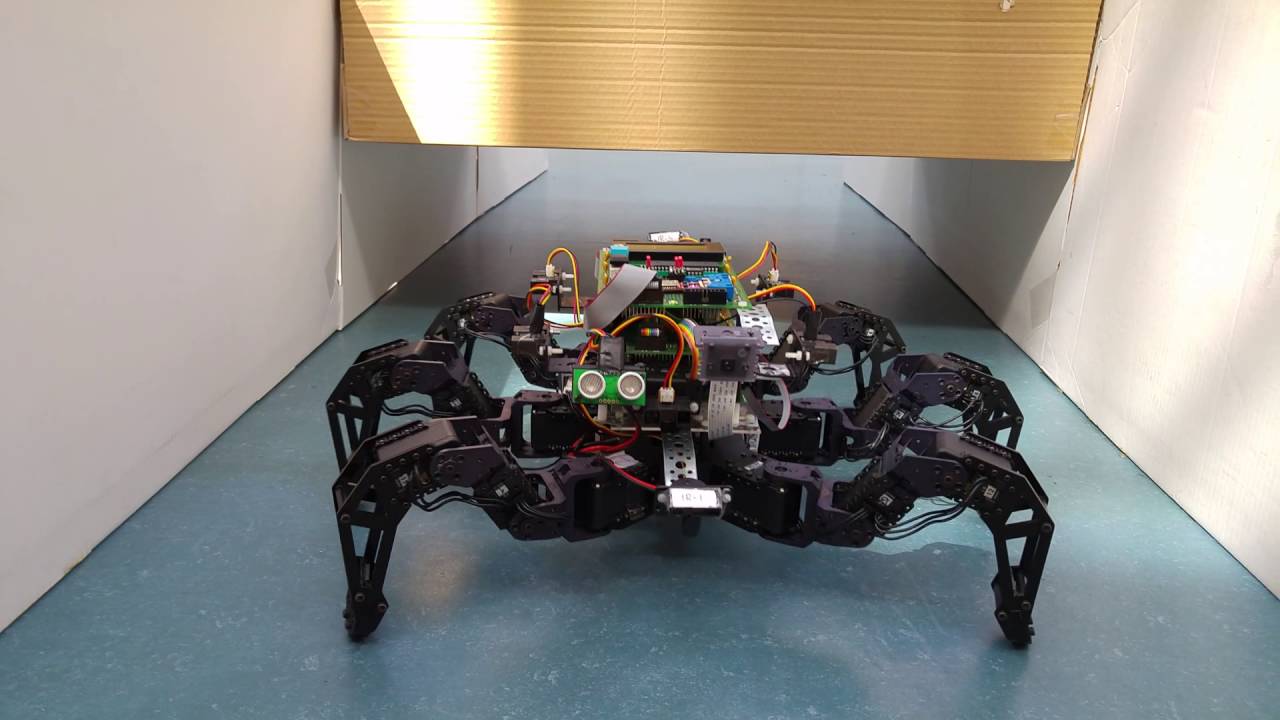
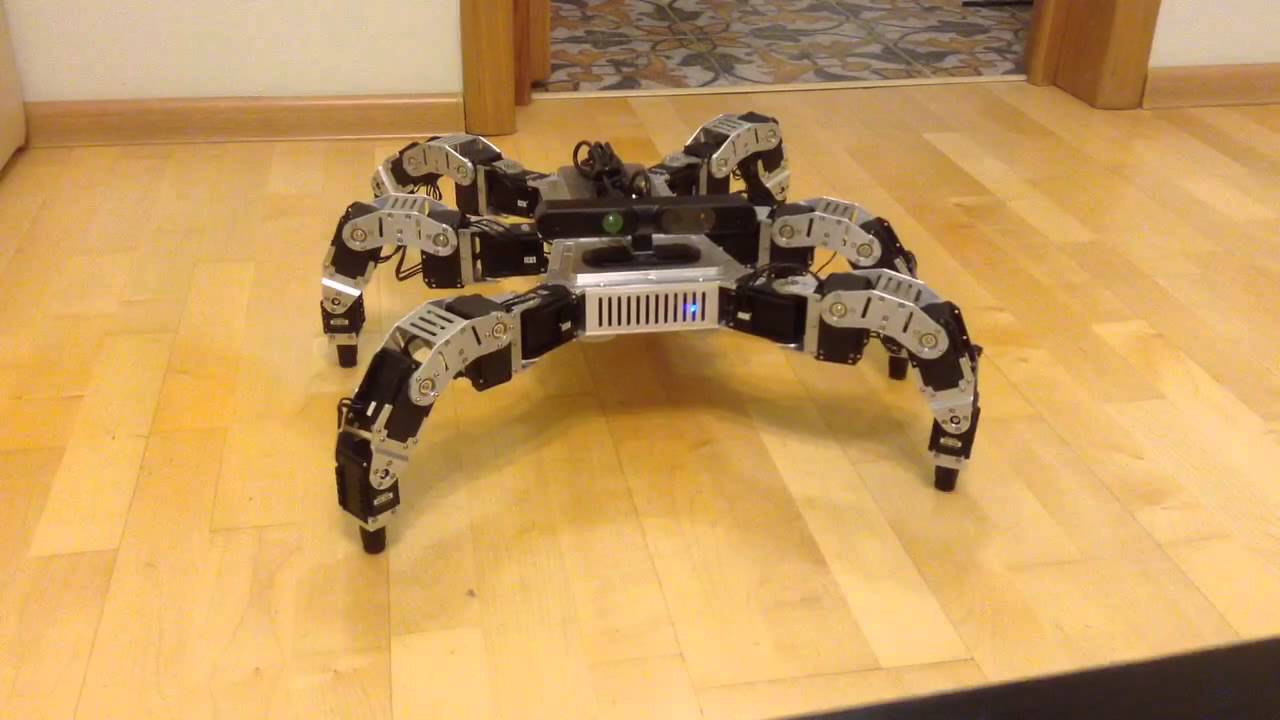
4DOF Hexapod using ROS
First steps of assembled (mostly, Xtion and antenna mounts still missing) hexapod. Some details: Body is custom-milled aluminum Each leg has 3 Dynamixel MX-64T servos for coxa, femur and tibia + AX-18A for tarsus Dynamixels are controlled through USB2AX module UM7 sensor for orientation control, connected through CHRobotics USB expansion board Asus Xtion RGB-D sensor for mapping and obstacle avoidance All kinematic calculations and processing of sensor data is done by on-board Intel NUC DC53427RKE For now hexapod is remotely controlled with PS3 joystick, later some autonomous capabilities will be added Software: Ubuntu 14.04 + ROS Indigo Pypot for controlling Dynamixels ROS packages: um7 for reading from UM7 openni for reading RGB-D from Xtion depthimage_to_laserscan for converting RGB-D data to laserscan used gmapping gmapping for SLAM Movement is controlled by a self-made ROS node, written in Python and containing inverse-kinematics solver and gait controller. Peculiarity of the gait controller is that there are no pre-defined gaits, all movements are calculated on the fly based on current position of thorax and limbs and target direction at this exact moment. New commands can be issued at any time and legs react instantly, without need to complete gait cycle. All legs are mostly independent of each other and only know whether immediate neighbors are landed or in swing. Whole gait forming is based on the restrictedness approach described in exhaustive detail in Michael Fielding’s thesis “Omnidirectional gait generating algorithm for hexapod robot” Gait generation parameters have not yet been optimized, so eventually movement should be smoother.
Comments