The Enactic OpenArm running in Nvidia ISaac Sim 5.1 with Isaac Lab 2.3 скачать в хорошем качестве
The Enactic OpenArm running in Nvidia ISaac Sim 5.1 with Isaac Lab 2.3
4 месяца назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: The Enactic OpenArm running in Nvidia ISaac Sim 5.1 with Isaac Lab 2.3 в качестве 4k
У нас вы можете посмотреть бесплатно The Enactic OpenArm running in Nvidia ISaac Sim 5.1 with Isaac Lab 2.3 или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон The Enactic OpenArm running in Nvidia ISaac Sim 5.1 with Isaac Lab 2.3 в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
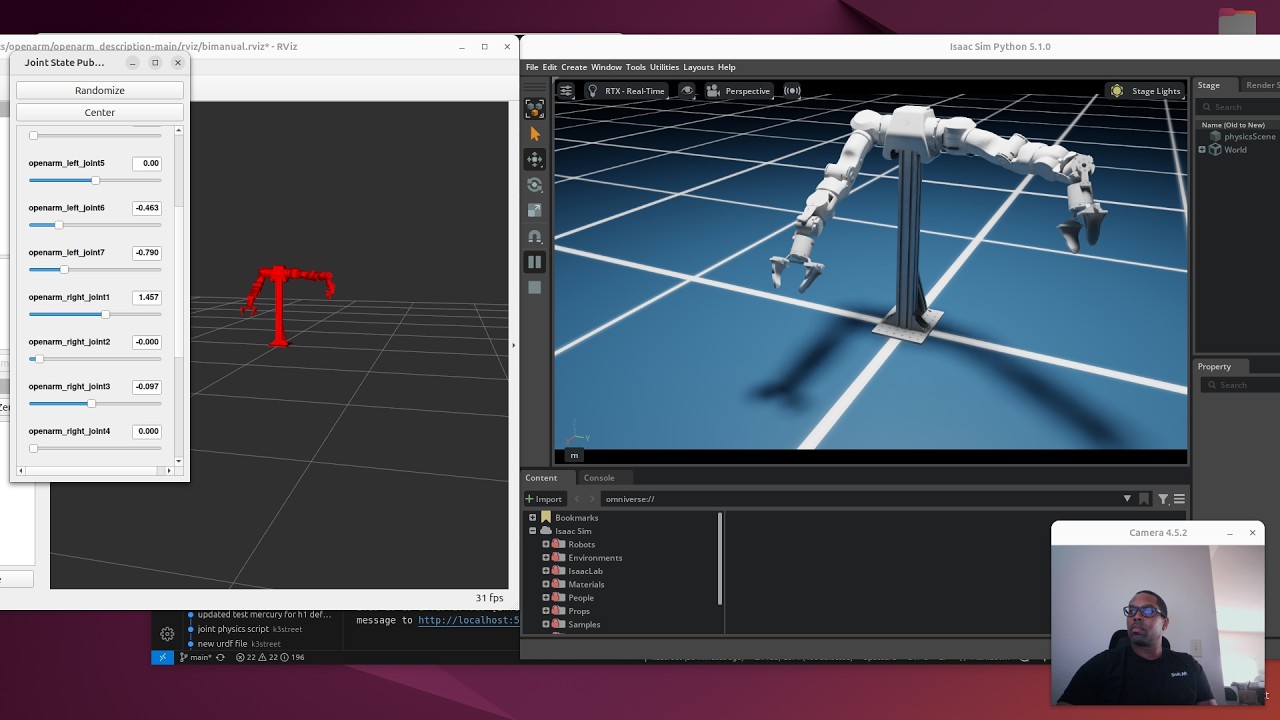
The Enactic OpenArm running in Nvidia ISaac Sim 5.1 with Isaac Lab 2.3
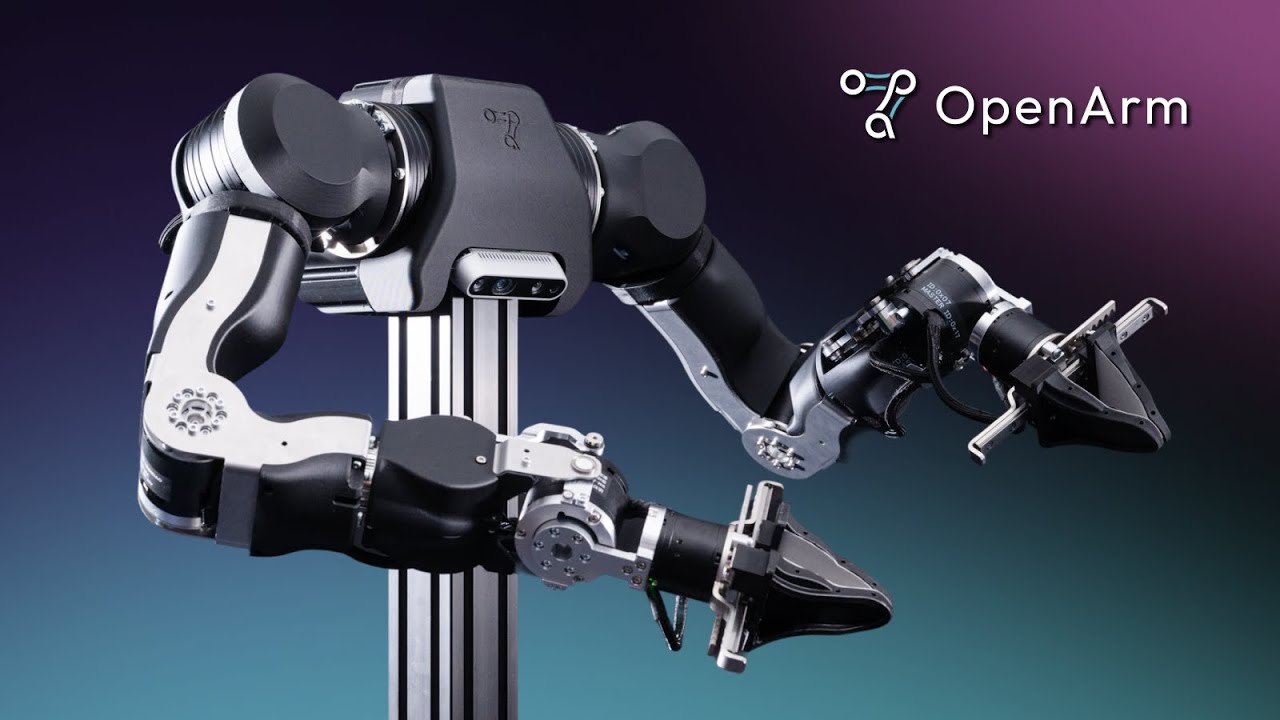
OpenArm Bimanual Teleop in Isaac Sim/Lab + ROS 2 (RViz, Webcam & Keyboard Control) In this video I bring the OpenArm bimanual robot into NVIDIA Isaac Sim/Lab, then teleoperate it two ways: webcam body/hand pose and keyboard. I also show a lightweight ROS 2 bridge so RViz sliders (and later MoveIt/ros2_control) can drive the simulated articulation in real time. 🔗 Project links • OpenArm site: https://openarm.dev/
Comments
-
 6 месяцев назад
6 месяцев назад
-
 1 год назад
1 год назад
-
 8 дней назад
8 дней назад
-
 Трансляция закончилась 7 месяцев назад
Трансляция закончилась 7 месяцев назад
-
 7 месяцев назад
7 месяцев назад
-
 1 год назад
1 год назад
-
 2 месяца назад
2 месяца назад
-
 1 день назад
1 день назад
-
 2 недели назад
2 недели назад
-
 2 дня назад
2 дня назад
-
 3 месяца назад
3 месяца назад
-
 1 день назад
1 день назад
-
 13 дней назад
13 дней назад
-
 1 день назад
1 день назад
-
 3 года назад
3 года назад
-
 7 месяцев назад
7 месяцев назад
-
 8 месяцев назад
8 месяцев назад
-
 2 года назад
2 года назад
-
 4 года назад
4 года назад
-
 1 год назад
1 год назад