Pick and Place Application using Delta Robot in Laboratories скачать в хорошем качестве
Pick and Place Application using Delta Robot in Laboratories
8 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Pick and Place Application using Delta Robot in Laboratories в качестве 4k
У нас вы можете посмотреть бесплатно Pick and Place Application using Delta Robot in Laboratories или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Pick and Place Application using Delta Robot in Laboratories в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
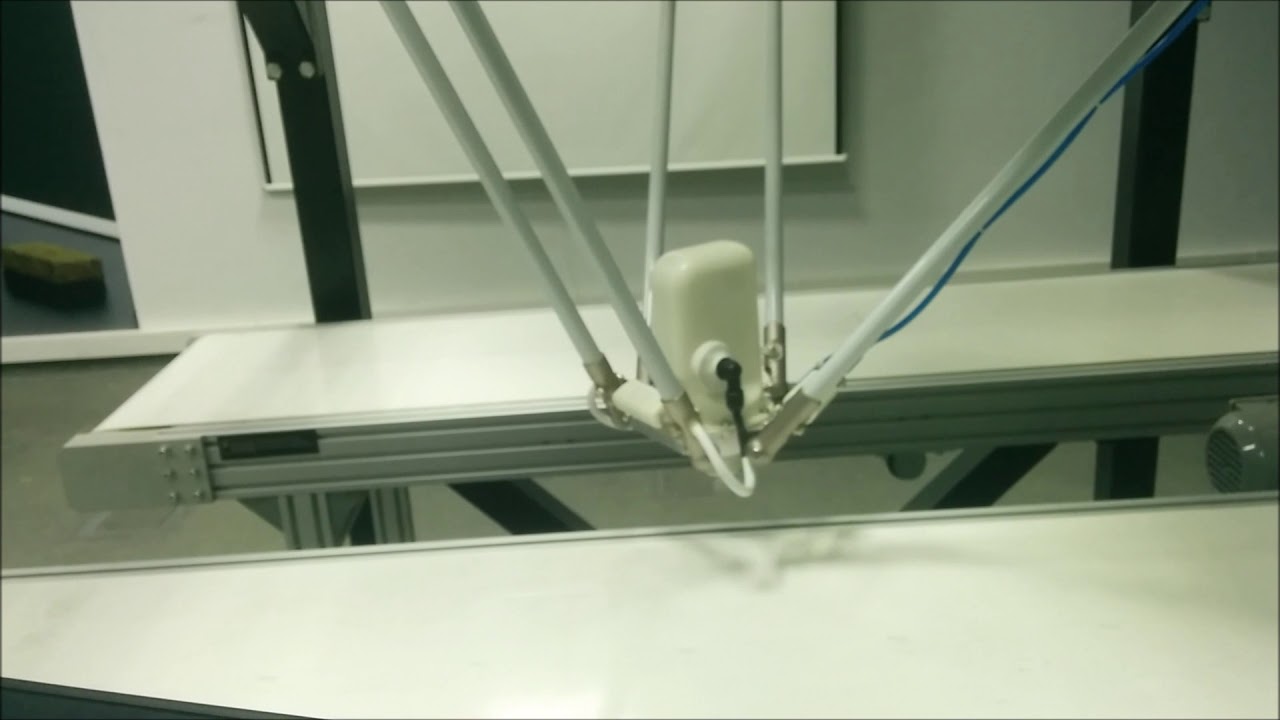
Pick and Place Application using Delta Robot in Laboratories
This project is my main thesis project. But there are some shortcomings. Vacuum ejector doesn't work efficiently .Robot can absorb with air pressure but it isn't enough for pulling a product that's why i couldn't get a product. I hope i'll do. Abstract: In this study, it is aimed to run the Delta robot which is used in the industry. For this, the kinematic model of the robot is established. Then OMRON series Delta robot programmed. Coordinate system transformations, coordinate system definitions, point teaching, conveyor banda synchronous movement, pick&place applications have been made. Due to the inefficiency of the vacuum generator in the pick&place application, it could not be resolved adequately. Finally , all of these last system parameter inputs were transferred to the HMI operator panel and a delta robot operated by the panel was run. -Thank Yildiz Technical University and Control&Automation Departmant for their contribution -Thank Assistant Prof. Seref Naci Engin from Control&Automation Engineering Department for his support and contribution -Thank Robot Expert Caner Beykont from OMRON Electronics for his help and support and contribution
Comments



















