Cache-friendly Design in Robot Path Planning with C++ - Brian Cairl - CppCon 2023 скачать в хорошем качестве
Cache-friendly Design in Robot Path Planning with C++ - Brian Cairl - CppCon 2023
2 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Cache-friendly Design in Robot Path Planning with C++ - Brian Cairl - CppCon 2023 в качестве 4k
У нас вы можете посмотреть бесплатно Cache-friendly Design in Robot Path Planning with C++ - Brian Cairl - CppCon 2023 или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Cache-friendly Design in Robot Path Planning with C++ - Brian Cairl - CppCon 2023 в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Cache-friendly Design in Robot Path Planning with C++ - Brian Cairl - CppCon 2023
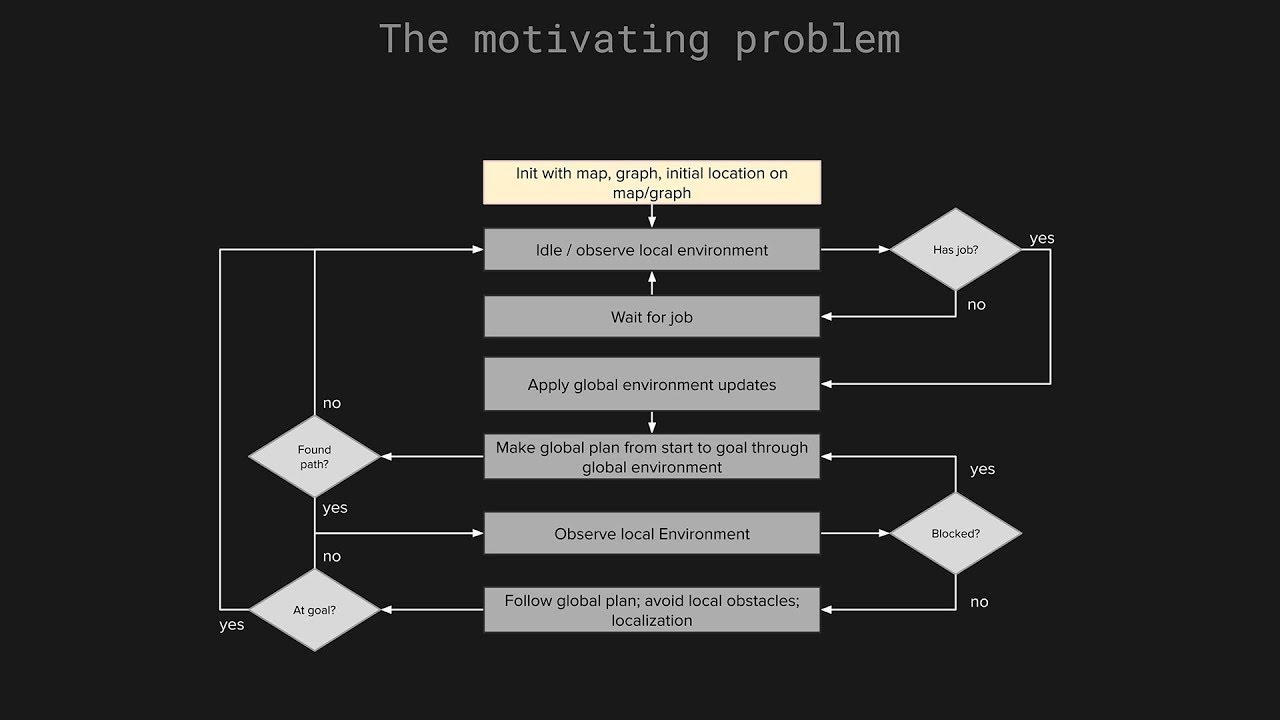
https://cppcon.org/ --- Cache-friendly Design in Robot Path Planning with C++ - Brian Cairl - CppCon 2023 https://github.com/CppCon/CppCon2023 Point-to-point planning is a major component in virtually all mobile robotic systems. These systems may require agents to generate paths over very large areas on demand; and sometimes several more times during their journey as part of intelligent recovery routines under dynamic environmental conditions. Since planning over large areas is a resource-intensive operation, particularly in higher-dimensional state-spaces, planning routines must be carefully tuned to execute as efficiently as possible so as to prevent perceptible delays in robot responsiveness. Attendees can expect an overview of common planning algorithms used in robotics, such as Dijkstra's and A-star, to provide a motivating context. Rather than focus on time saving tricks specific to a particular environment or robot morphology, we will instead focus on getting the most out of these algorithms by way of leveraging cache-friendly design of requisite graph and memoization structures; and memory layouts. In particular, we will focus on achieving these results using common C++ STL facilities; and compile-time facilities to promote generic design, where possible. Finally, we will provide comparisons between naive and cache-optimized implementations; and guides for effectively profiling these algorithms for system-specific tuning purposes. --- Brian Cairl Brian is a robotics software engineer and daily user of the C++ language. They attended The Polytechnic University of NYU where they studied electrical engineering with a concentration in robotics and controls. Upon graduation, Brian worked at Fetch Robotics, a robotics startup based in California, until it was acquired in 2021. They now work at Third Wave automation, an automated forklift startup. Much of their work in the robotics space has involved work on perception and navigation systems; as well as the design of frameworks, libraries and general architecture focused on improving large robotics code bases comprised, mostly, of C++ code. Brian enjoys game engine design and template meta-programming in their free time. --- Work at Hudson River Trading (HRT): https://tinyurl.com/safxfctf --- Videos Filmed & Edited by Bash Films: http://www.BashFilms.com YouTube Channel Managed by Digital Medium Ltd: https://events.digital-medium.co.uk --- Registration for CppCon: https://cppcon.org/registration/ #cppcon #cppprogramming #cpp #robotics
Comments
![[POPL 2026] Tutorial: Analyzing Shell Scripts](https://imager.clipsaver.ru/paY_QjmCKiI/max.jpg)

![Best of Deep House [2026] | Melodic House & Progressive Flow](https://imager.clipsaver.ru/Il-ZpBuC8tA/max.jpg)














