Régulation PID, TIA POTAL V17 скачать в хорошем качестве
Régulation PID, TIA POTAL V17
3 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Régulation PID, TIA POTAL V17 в качестве 4k
У нас вы можете посмотреть бесплатно Régulation PID, TIA POTAL V17 или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Régulation PID, TIA POTAL V17 в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
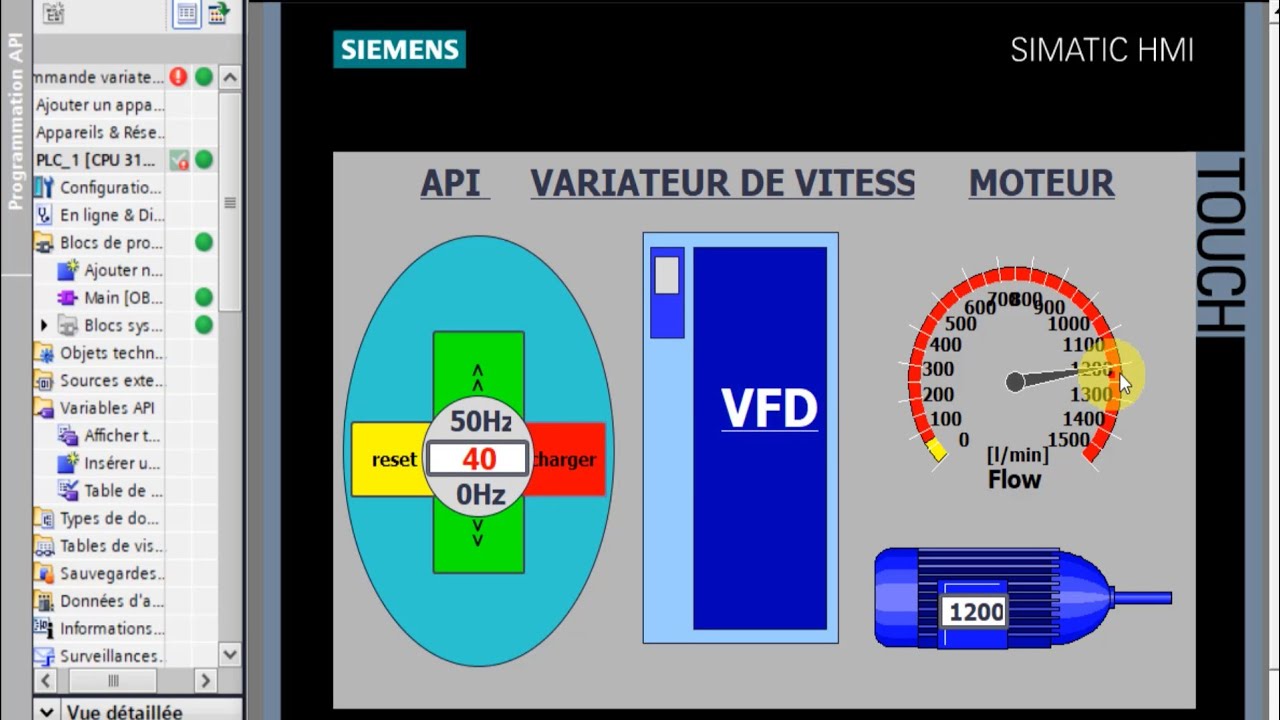
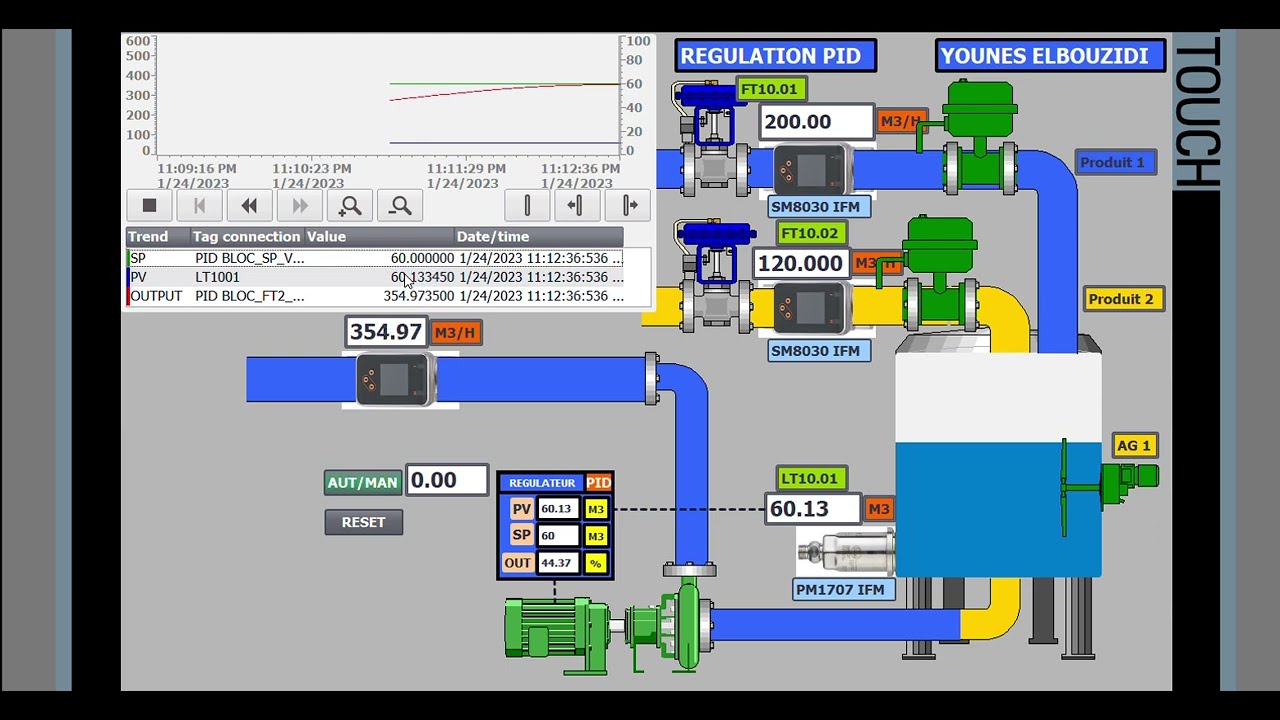
Régulation PID, TIA POTAL V17
Régulation PID avec tia Portal V17, S 7 1500, Simulation avec Plcsim advenced v4.0 Régulation de niveau d'un liquide dans un réservoir, en fonction de débit d'entrée en agir sur la vitesse du pompe pour contrôler le débit de sortie afin de garder le niveau constant. La régulation PID (Proportional-Integral-Derivative) est un type de système de contrôle largement utilisé dans les domaines de l'ingénierie et de l'industrie pour réguler ou contrôler un processus. C'est un composant essentiel de nombreux systèmes automatisés visant à maintenir des valeurs de consigne souhaitées et à stabiliser des processus. Le régulateur PID calcule en continu un signal d'erreur en comparant la valeur de consigne désirée (SP) avec la variable de processus réelle (PV). Le signal d'erreur est ensuite utilisé pour ajuster l'action de contrôle afin de rapprocher la variable de processus de la consigne. Les trois termes du régulateur PID sont les suivants : Terme proportionnel (P) : Le terme P produit une sortie proportionnelle à l'erreur actuelle. Il contrôle la réponse immédiate à l'erreur et est responsable de l'état actuel du système. Terme intégral (I) : Le terme I prend en compte l'accumulation des erreurs passées au fil du temps. Il contribue à éliminer les erreurs en régime permanent et produit une sortie qui corrige les périodes prolongées d'écart par rapport à la consigne. Terme dérivé (D) : Le terme D anticipe les erreurs futures en examinant la vitesse de variation du signal d'erreur. Il contribue à amortir les oscillations et à stabiliser le système. La sortie du régulateur PID (U) est calculée à l'aide de l'équation suivante : U(t) = Kp * e(t) + Ki * ∫e(t) dt + Kd * de(t)/dt où : Kp, Ki et Kd sont les coefficients de proportionnalité, d'intégration et de dérivation, respectivement. e(t) est l'erreur à l'instant t (SP - PV). ∫e(t) dt est l'intégrale de l'erreur par rapport au temps, représentant l'erreur accumulée. de(t)/dt est la dérivée de l'erreur par rapport au temps, représentant la vitesse de variation de l'erreur. L'accord du régulateur PID consiste à ajuster les valeurs de Kp, Ki et Kd pour obtenir la réponse souhaitée du système. Le processus d'accord peut être complexe et dépend des caractéristiques spécifiques du processus contrôlé. Il existe différentes méthodes et algorithmes disponibles pour l'accord des régulateurs PID, tels que la méthode de Ziegler-Nichols ou l'utilisation de techniques d'optimisation modernes. Les régulateurs PID sont largement utilisés dans divers secteurs, notamment la fabrication, le contrôle des processus, la robotique, les systèmes de contrôle automobile et de nombreuses autres applications où un contrôle précis et une stabilité sont requis. Ils sont considérés comme l'un des algorithmes de contrôle fondamentaux en raison de leur simplicité, leur efficacité et leur polyvalence
Comments