SIAM DS21: Michael Banks - Koopman Mode Analysis and Control of a Soft Robotic Arm скачать в хорошем качестве
SIAM DS21: Michael Banks - Koopman Mode Analysis and Control of a Soft Robotic Arm
4 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: SIAM DS21: Michael Banks - Koopman Mode Analysis and Control of a Soft Robotic Arm в качестве 4k
У нас вы можете посмотреть бесплатно SIAM DS21: Michael Banks - Koopman Mode Analysis and Control of a Soft Robotic Arm или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон SIAM DS21: Michael Banks - Koopman Mode Analysis and Control of a Soft Robotic Arm в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
SIAM DS21: Michael Banks - Koopman Mode Analysis and Control of a Soft Robotic Arm
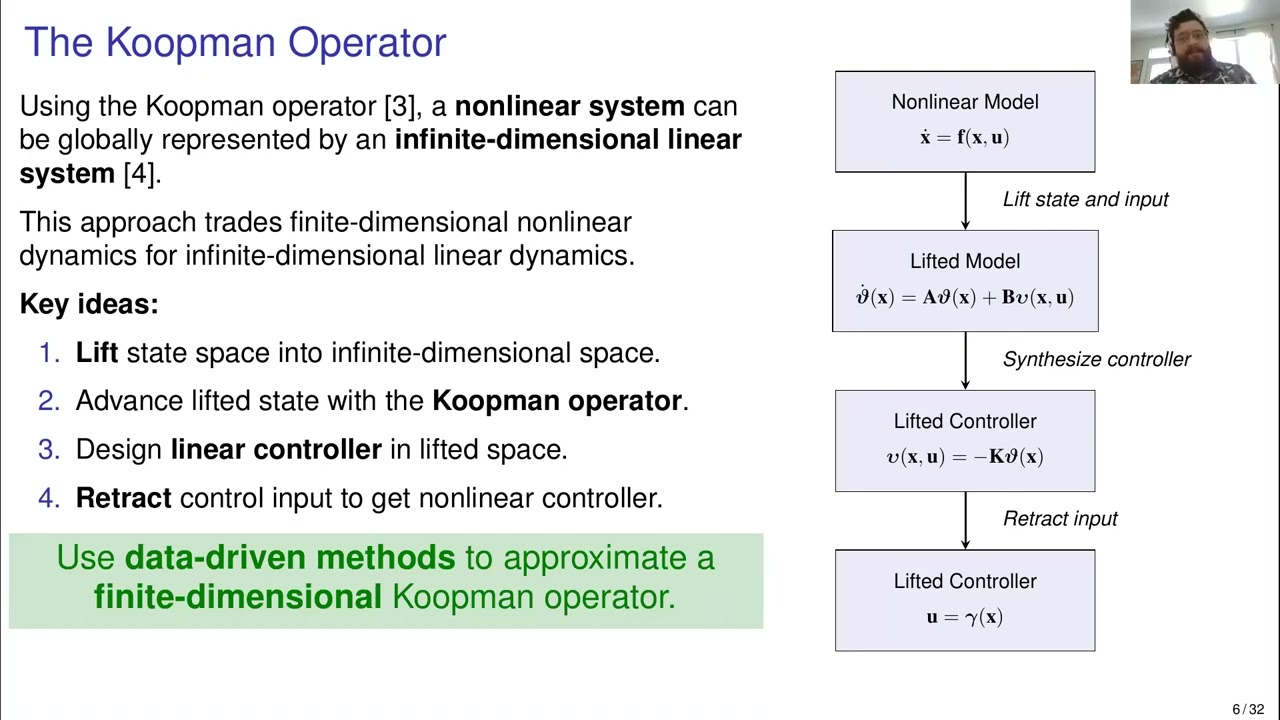
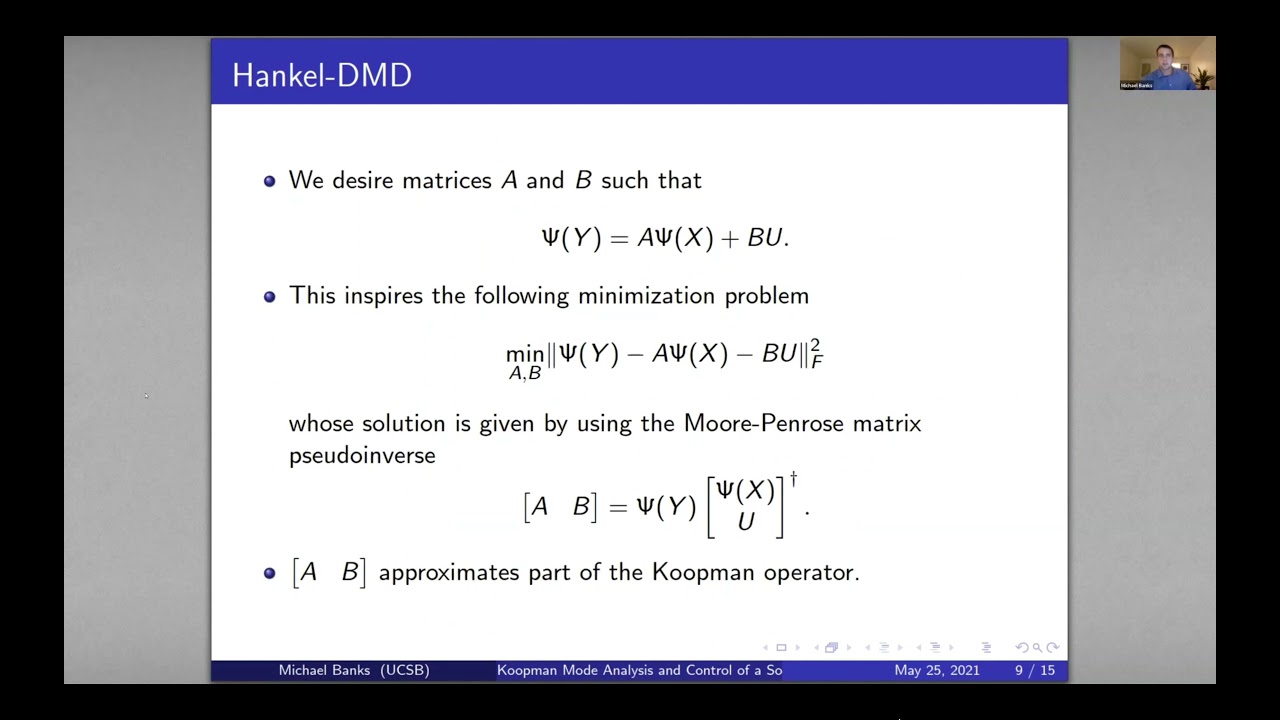
Abstract. Due to their inherent flexibility and versatility, soft robots open up the field of robotics to a new range of capabilities not available to rigid robots. Due to their essentially infinite dimensional, nonlinear dynamics, the modeling and control of these systems from first principles is not practical. Instead, data-driven methods are preferred. We apply the data-driven approximation of the Koopman operator to the modeling and control of a pneumatic soft robot arm. The resulting Koopman mode decomposition is used to distinguish the robot's fundamental dynamic modes and classify them based on frequency and decay rate. Existing research uses a black-box approach, whereas we use the decomposition of the dynamics into Koopman modes to reveal the underlying physics without knowledge of any governing equations. This approach also allows us to amplify or stabilize specific behaviors in order to achieve control objectives. Authors Michael Banks, University of California, Santa Barbara, U.S., mjbanks@ucsb.edu David Haggerty, University of California, Santa Barbara, U.S., davidhaggerty@ucsb.edu Patrick Curtis, University of California, Santa Barbara, U.S., patrick_curtis@ucsb.edu Igor Mezic, University of California, Santa Barbara, U.S., mezic@ucsb.edu Elliot Hawkes, University of California, Santa Barbara, U.S., ewhawkes@ucsb.edu
Comments