Model-Agnostic-Predictive Temporal Difference for active control | Tapas Tripura | JHU-IITD SMaRT скачать в хорошем качестве
Model-Agnostic-Predictive Temporal Difference for active control | Tapas Tripura | JHU-IITD SMaRT
3 месяца назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Model-Agnostic-Predictive Temporal Difference for active control | Tapas Tripura | JHU-IITD SMaRT в качестве 4k
У нас вы можете посмотреть бесплатно Model-Agnostic-Predictive Temporal Difference for active control | Tapas Tripura | JHU-IITD SMaRT или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Model-Agnostic-Predictive Temporal Difference for active control | Tapas Tripura | JHU-IITD SMaRT в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Model-Agnostic-Predictive Temporal Difference for active control | Tapas Tripura | JHU-IITD SMaRT
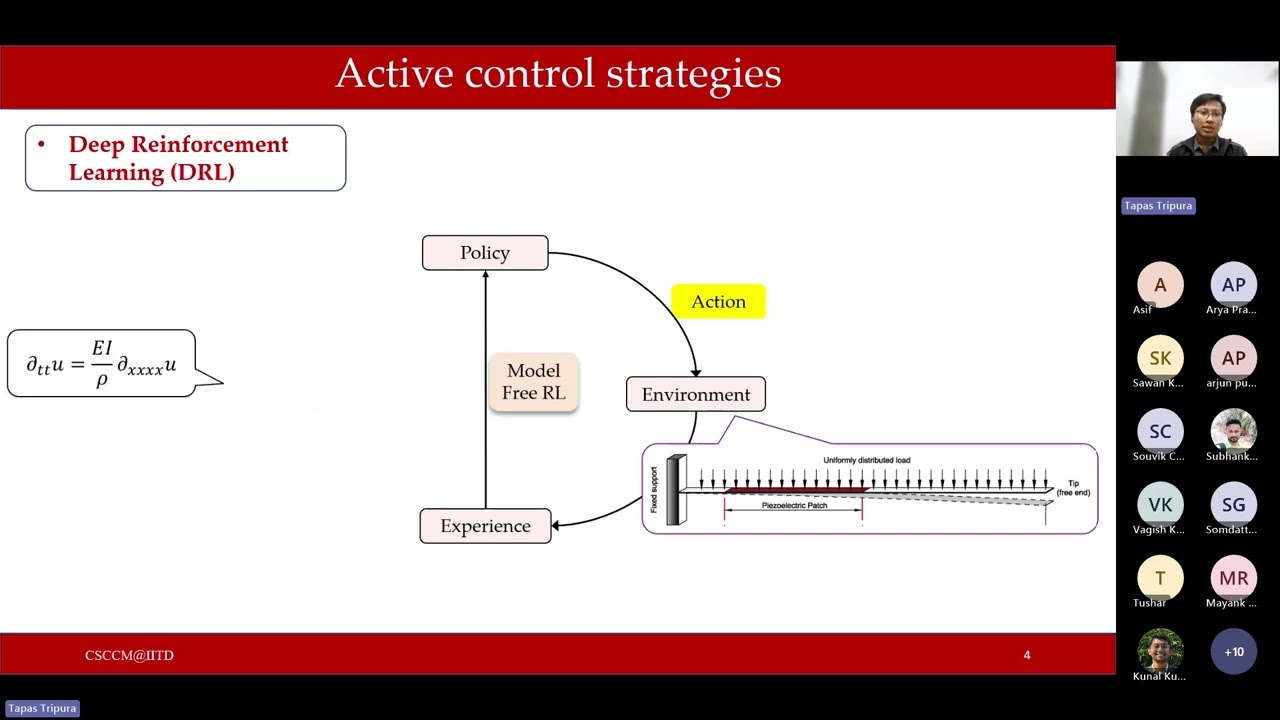
This talk is part of the Scientific Machine Learning Research Talks (SMaRT) Seminar Series, a joint initiative between Johns Hopkins University and IIT Delhi. 🔹 Speaker: Tapas Tripura Ph.D. Scholar, Department of Applied Mechanics Indian Institute of Technology (IIT) Delhi, India 🔹 Talk Title: Model-Agnostic Predictive Temporal Difference for Active Control 🔹 Date: Wednesday, November 5, 2025 Time: 7:30 PM IST | 2:00 PM GMT | 9:00 AM ET 📄 Abstract Deep Reinforcement Learning (DRL) has achieved remarkable success in complex decision-making and control tasks. However, its widespread adoption in predictive control remains constrained by data inefficiency and poor long-horizon generalization. In this talk, Tapas introduces the Model-Agnostic Predictive Temporal Difference (MAP TD) framework — a deep reinforcement learning approach that enables effective control of systems even when their governing physics are unknown. MAP TD integrates model-based learning with a parsimonious and interpretable dynamics model discovered offline using Sparse Bayesian Learning (SBL). This pre-trained model serves as a long-horizon predictor within the DRL architecture, enabling efficient planning and learning without requiring online model adaptation. The framework combines trajectory prediction with reinforcement learning, accumulating rewards and value estimates along predicted trajectories via a jointly trained terminal value function. To further accelerate learning, MAP TD employs a hybrid solver strategy that alternates between coarse and fine solvers, striking a balance between computational efficiency and prediction accuracy. Overall, MAP TD offers a robust, interpretable, and computationally efficient solution for predictive control, enabling intelligent long-horizon decision-making in complex dynamical systems. 👤 About the Speaker Tapas Tripura is a Ph.D. scholar in the Department of Applied Mechanics at IIT Delhi, affiliated with the Center for Scientific Computing and Computational Mechanics (CSCCM). His research lies at the intersection of physics, computation, and artificial intelligence, focusing on data-driven discovery of physical systems, operator learning, and reinforcement learning for intelligent control. Tapas is the developer of several pioneering frameworks, including the Wavelet Neural Operator (WNO), the Neural Compositional Wavelet Operator (NCWNO), a scientific foundation model, and a Lagrangian discovery framework for uncovering governing equations directly from data. He is a recipient of the Prime Minister’s Research Fellowship (PMRF), awarded by the Ministry of Education, Government of India. 📌 Follow the SMaRT Seminar Series for more talks at the intersection of AI, physics, and scientific computing. #ReinforcementLearning #PredictiveControl #ScientificMachineLearning #OperatorLearning #PhysicsInformedAI #TapasTripura #JHUIITD #DeepLearning #SciML
Comments