Car Hacking : CAN BUS Dominant, Recessive and Shorted Can Simulation скачать в хорошем качестве
Car Hacking : CAN BUS Dominant, Recessive and Shorted Can Simulation
7 дней назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Car Hacking : CAN BUS Dominant, Recessive and Shorted Can Simulation в качестве 4k
У нас вы можете посмотреть бесплатно Car Hacking : CAN BUS Dominant, Recessive and Shorted Can Simulation или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Car Hacking : CAN BUS Dominant, Recessive and Shorted Can Simulation в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
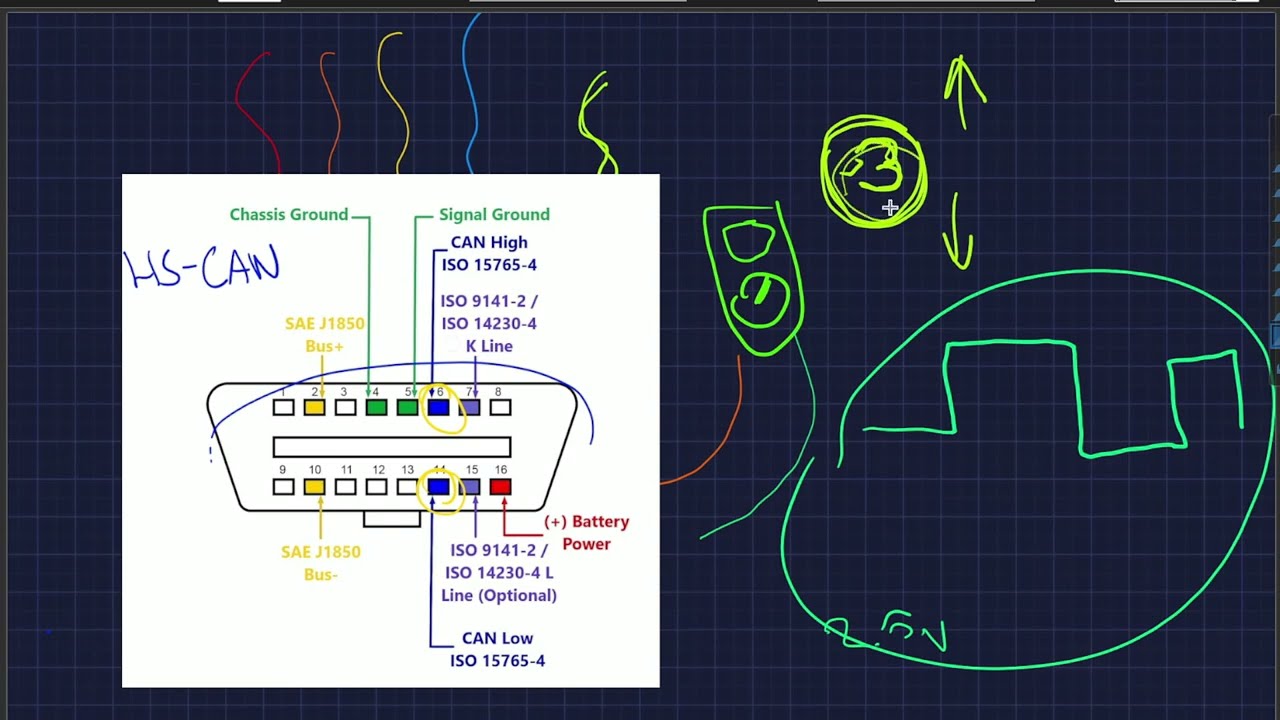
Car Hacking : CAN BUS Dominant, Recessive and Shorted Can Simulation
In this simulation, we analyze the electrical fundamentals of the CAN physical layer. We move beyond binary data to examine the differential voltages between CAN High and CAN Low during normal operation and fault conditions. Normal Operation: Recessive State: Idle bus at 2.5V (0V differential). Dominant State: CAN High at 3.5V and CAN Low at 1.5V (2V differential). Fault Simulations: Shorted CAN High to Ground: Analysis of voltage drop and signal loss. Shorted CAN Low to Voltage: Common-mode shift leading to network blackout. Short Between CAN High and CAN Low: Differential collapse preventing arbitration. Termination Failure: Signal reflection and ringing caused by missing 120-ohm resistors. This deep dive focuses on the hardware-level logic required to troubleshoot "Bus-Off" states and corrupted frames at the copper level. Part of the Sector-Null Engineering-Focused Forensics Curriculum.
Comments