LTI System part - 4/OPPENHEIM Solution Chapter2/Convolution/2.4/Signals and Systems/Rajiv Patel скачать в хорошем качестве
LTI System part - 4/OPPENHEIM Solution Chapter2/Convolution/2.4/Signals and Systems/Rajiv Patel
4 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: LTI System part - 4/OPPENHEIM Solution Chapter2/Convolution/2.4/Signals and Systems/Rajiv Patel в качестве 4k
У нас вы можете посмотреть бесплатно LTI System part - 4/OPPENHEIM Solution Chapter2/Convolution/2.4/Signals and Systems/Rajiv Patel или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон LTI System part - 4/OPPENHEIM Solution Chapter2/Convolution/2.4/Signals and Systems/Rajiv Patel в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
LTI System part - 4/OPPENHEIM Solution Chapter2/Convolution/2.4/Signals and Systems/Rajiv Patel
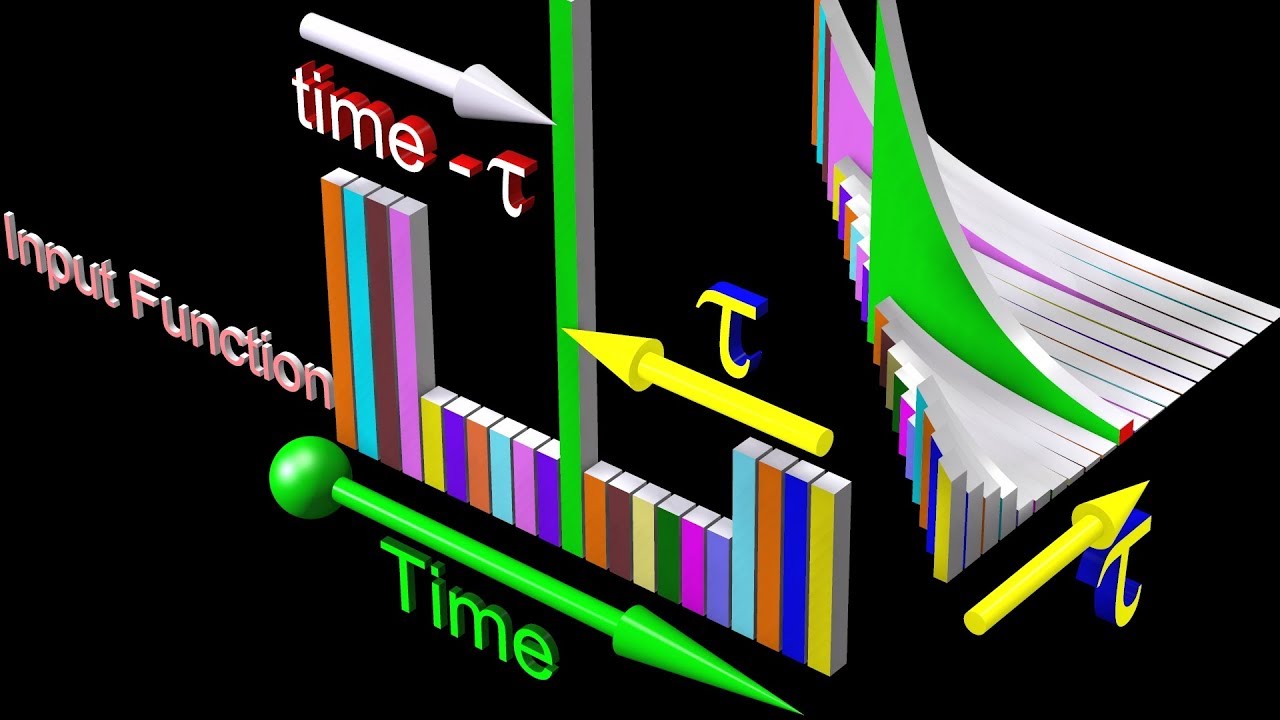
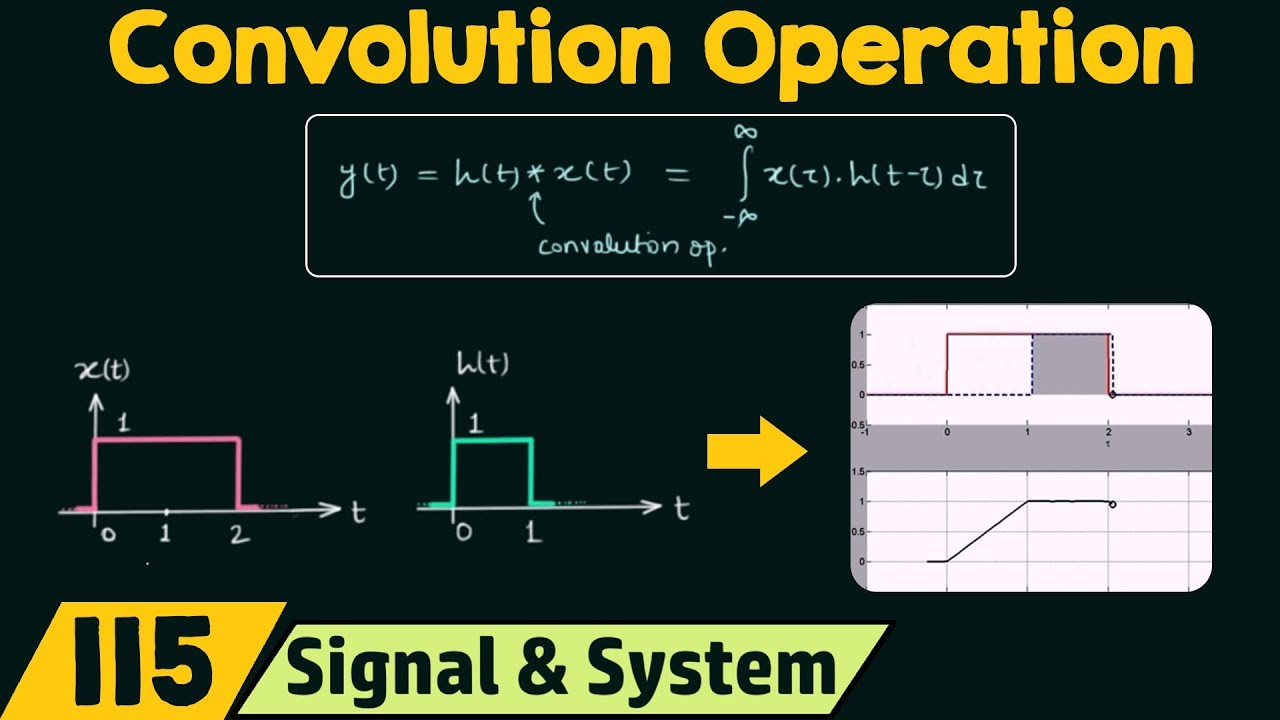
This video will provide full concept of convolution by solving one problem that is 2.4. After watching these series of videos you will be able to solve any conceptual problems of LTI Systems i.e. convolution. Rajiv Patel got AIR 5 in GATE 2012 Signals and Systems: International Edition, 2nd Edition Alan V. Oppenheim, Massachusetts Institute of Technology Alan S. Willsky, Massachusetts Institute of Technology with S. Hamid, Boston University expansion of ex, sinx, cosx, log(1+x) in 2 seconds • power series expansion of any function in ... how to find time period of different type of signals • Signals and Systems Basic-17/Periodic Sign... A principal objective of this Bideo is to develop an understanding of these proper- ties and tools and to provide an introduction to several of the very important applications in which the tools are used. In this chapter, we begin the development by deriving and examining a fundamental and extremely useful representation for LTI systems and by introducing an important class of these systems. The characterization of LTI systems through the convolution is obtained by representing the input signal as a superposition of weighted impulses. In the DT case, suppose we are given an LTI mapping whose impulse response is h[n], i.e., when its input is the unit sample or unit “impulse” function δ[n], its output is h[n]. Convolution, one of the most important concepts in electrical engineering, can be used to determine the output a system produces for a given input signal. It can be shown that a linear time invariant system is completely characterized by its impulse response. The sifting property of the continuous time impulse function tells us that the input signal to a system can be represented as an integral of scaled and shifted impulses and, therefore, as the limit of a sum of scaled and shifted approximate unit impulses. Thus, by linearity, it would seem reasonable to compute of the output signal as the limit of a sum of scaled and shifted unit impulse responses and, therefore, as the integral of a scaled and shifted impulse response. That is exactly what the operation of convolution accomplishes. Hence, convolution can be used to determine a linear time invariant system's output from knowledge of the input and the impulse response. #mathosy #ltisystem #solution #problem #sketch #plot #draw #mathosyguru #rajivpatel #system #signal #exercise #Oppenheim #hamidnabab solution of problem number 1.26a, 1.26b, 1.26c, 1.26d and 1.26e of Alan V oppenheim Alan S. Willsky S. Hamid Nawab by Rajiv Patel All India Rank - 5 in GATE 2012 • Signals and Systems Basic-21/Solution of P... Solution of problems 1.27a,1.27b,1.27c,1.27d,1.27e,1.27f,1.27g of Alan V. oppenheim • Signals and Systems Basic-25/Solution of 1...
Comments